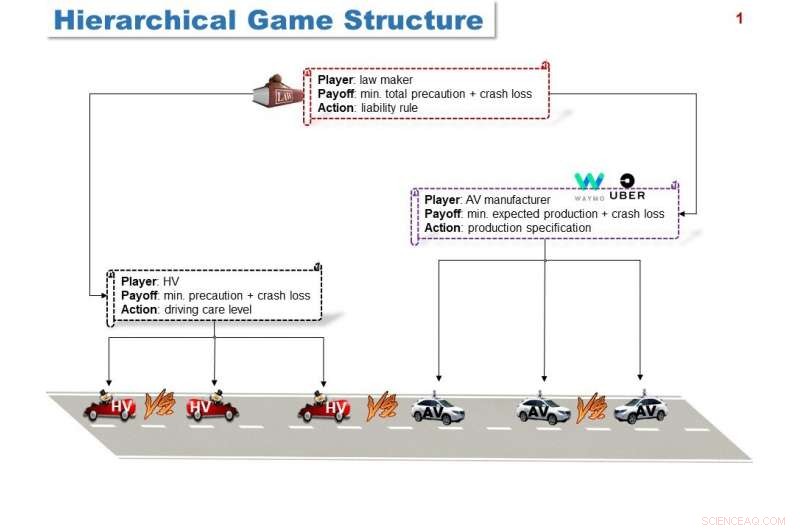
Estrutura Hierárquica do Jogo, ilustrando as interações estratégicas hierárquicas de três camadas entre o legislador, o fabricante do AV, AVs, e HVs nas estradas. Cada jogador tem objetivos distintos ou mesmo conflitantes, com o objetivo de selecionar uma estratégia para otimizar seus objetivos. Crédito:Sharon Di e Xu Chen / Columbia Engineering
Uma decisão recente do National Transpiration Safety Board (NTSB) sobre o acidente do Uber em março de 2018 que matou um pedestre no Arizona dividiu a culpa entre o Uber, o veículo autônomo da empresa (AV), o motorista de segurança no veículo, a vítima, e o estado do Arizona. Com o advento dos carros autônomos, as conclusões do NTSB levantam uma série de questões sobre a incerteza no atual sistema de responsabilidade legal. Em um acidente envolvendo um AV e um motorista humano, quem é o responsável? Se ambos forem responsáveis, como deve a perda do acidente ser repartida entre eles?
AVs retiram as pessoas da tarefa prática de dirigir e, portanto, representam um desafio complexo para a lei de responsabilidade civil de acidentes de hoje, que pune principalmente os humanos. Os especialistas jurídicos prevêem que, programando algoritmos de condução, fabricantes de automóveis autônomos, incluindo designers de automóveis, fornecedores de sensores, desenvolvedores de software, fabricantes de automóveis, e partes relacionadas que contribuem para o design, fabricação, e teste, terá uma influência direta no tráfego. Embora esses algoritmos tornem os fabricantes atores indispensáveis, com a responsabilidade do produto potencialmente desempenhando um papel crítico, os formuladores de políticas ainda não desenvolveram um método quantitativo para atribuir a perda entre o carro que dirige sozinho e o motorista humano.
Para resolver este problema, pesquisadores da Columbia Engineering e da Columbia Law School desenvolveram uma regra de responsabilidade baseada em culpa conjunta que pode ser usada para regular fabricantes de automóveis autônomos e motoristas humanos. Eles propõem um modelo teórico do jogo que descreve as interações estratégicas entre o legislador, o fabricante de carros autônomos, o carro que dirige sozinho, e motoristas humanos, e examinar como, à medida que a penetração de AVs no mercado aumenta, a regra de responsabilidade deve evoluir.
Suas descobertas são descritas em um novo estudo a ser apresentado em 14 de janeiro por Sharon Di, professor assistente de engenharia civil e mecânica de engenharia, e Eric Talley, Isidor e Seville Sulzbacher Professor de Direito, na 99ª Reunião Anual do Transportation Research Board em Washington, D.C
Embora a maioria dos estudos atuais tenha se concentrado no projeto de algoritmos de condução de AVs em vários cenários para garantir a eficiência e a segurança do tráfego, eles não exploraram a adaptação comportamental dos motoristas humanos aos AVs. Di e Talley questionaram sobre o efeito do "risco moral" em humanos, seja com a exposição a mais e mais encontros de tráfego com AVs, as pessoas podem estar menos inclinadas a exercer o "devido cuidado" quando confrontadas com AVs na estrada e dirigir de uma forma mais arriscada.
"Os motoristas humanos percebem os AVs como agentes inteligentes com a capacidade de se adaptar a um comportamento de direção humano mais agressivo e potencialmente perigoso, "diz Di, que é membro do Data Science Institute da Columbia. "Descobrimos que os motoristas humanos podem tirar proveito dessa tecnologia dirigindo sem cuidado e correndo mais riscos, porque eles sabem que os carros autônomos seriam projetados para conduzir de forma mais conservadora. "
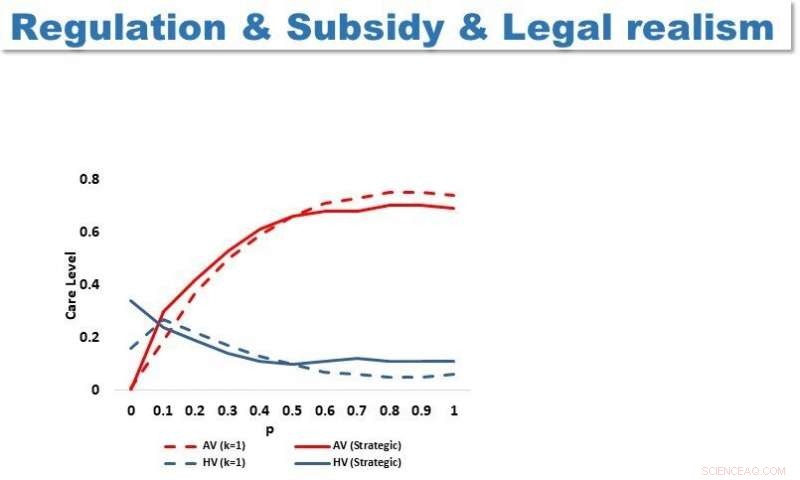
A equipe descobriu que uma política de responsabilidade projetada de forma otimizada é crítica para ajudar a evitar que motoristas humanos desenvolvam risco moral e para ajudar o fabricante de AV com uma compensação entre a segurança no trânsito e os custos de produção. Crédito:Sharon Di e Xu Chen / Columbia Engineering
Os pesquisadores usaram a teoria dos jogos para modelar um mundo com jogadores interagindo que tentam selecionar suas próprias ações para otimizar seus próprios objetivos. Os jogadores - legisladores, Fabricantes de AV, AVs, e motoristas humanos - têm objetivos diferentes no ecossistema de transporte. Os legisladores querem regular o trânsito com maior eficiência e segurança, os fabricantes de automóveis autônomos são voltados para o lucro, e carros autônomos e motoristas humanos interagem em vias públicas e procuram selecionar as melhores estratégias de direção. Para capturar a interação complexa entre todos os jogadores, os pesquisadores aplicaram métodos de teoria dos jogos para ver em qual estratégia cada jogador escolhe, para que outros não tirem proveito de suas decisões.
O jogo hierárquico ajudou a equipe a entender o risco moral dos motoristas humanos (quanto risco os motoristas podem decidir assumir), o impacto do fabricante do AV na segurança do tráfego, e a adaptação do legislador ao novo ecossistema de transporte. Eles testaram o jogo e seu algoritmo em um conjunto de exemplos numéricos, oferecendo insights sobre a evolução comportamental de AVs e HVs conforme a taxa de penetração de AV aumenta e conforme os parâmetros de custo ou ambiente variam.
A equipe descobriu que uma política de responsabilidade projetada de forma otimizada é crítica para ajudar a evitar que motoristas humanos desenvolvam risco moral e para ajudar o fabricante de AV com uma compensação entre a segurança no trânsito e os custos de produção. Os subsídios do governo aos fabricantes de AV para a redução dos custos de produção encorajariam muito os fabricantes a produzir AVs que superem os motoristas humanos substancialmente e melhorem a segurança e eficiência geral do tráfego. Além disso, se os fabricantes de AV não forem regulamentados em termos de especificações de tecnologia AV ou não forem devidamente subsidiados, Os fabricantes de AV tendem a ser puramente orientados para o lucro e destrutivos para o sistema de tráfego geral.
"A trágica fatalidade no Arizona envolvendo um automóvel autônomo atraiu uma tremenda atenção do público e dos legisladores sobre como traçar os limites da responsabilidade legal quando os AVs interagem com motoristas humanos, ciclistas, e pedestres, "Talley acrescenta." O surgimento de AVs introduz um tipo particularmente espinhoso de incerteza no status quo, e um que retroalimenta a fabricação e o design de AV. A responsabilidade legal por acidentes entre automóveis e pedestres normalmente envolve um cálculo complexo de avaliações comparativas de falhas para cada um dos grupos acima mencionados. A introdução de um veículo autônomo pode complicar ainda mais as coisas, adicionando outras partes à mistura, como os fabricantes de hardware e programadores de software. E a cobertura de seguro distorce ainda mais as questões ao incluir partes interessadas terceirizadas. Esperamos que nossas ferramentas analíticas ajudem os formuladores de políticas antivírus em suas decisões regulatórias, e ao fazer isso, ajudará a mitigar a incerteza no ambiente regulatório existente em torno das tecnologias AV. "
Di e Talley estão agora procurando vários fabricantes de AV que visam diferentes mercados globais com diferentes especificações tecnológicas, tornando o desenvolvimento de regras legais ainda mais complexo.
"Sabemos que os motoristas humanos correrão mais riscos e desenvolverão risco moral se pensarem que seu ambiente rodoviário se tornou mais seguro, "Di observa." Está claro que um projeto de regra de responsabilidade ideal é crucial para melhorar o bem-estar social e a segurança no trânsito com tecnologias de transporte avançadas. "