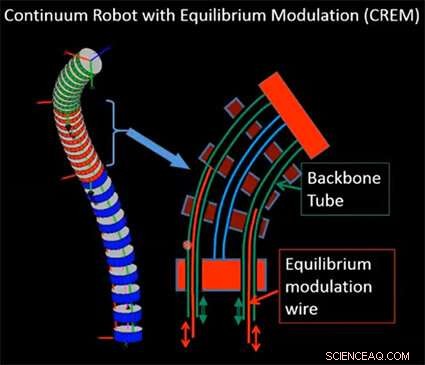
 p Aumento de uma macroescala existente, O robô multi-backbones com recursos de movimento em escala de mícron é obtido adicionando fios (vermelhos) dentro da estrutura que podem deslizar para dentro e para fora dos backbones tubulares. Isso permite a modulação da forma de equilíbrio. O robô ainda consegue movimento em grande escala (macro) usando os backbones secundários tubulares rigidamente fixados ao disco vermelho superior. Por atuação direta, empurrando e puxando sobre eles, a configuração contínua do robô muda. Crédito:Vanderbilt University
p Aumento de uma macroescala existente, O robô multi-backbones com recursos de movimento em escala de mícron é obtido adicionando fios (vermelhos) dentro da estrutura que podem deslizar para dentro e para fora dos backbones tubulares. Isso permite a modulação da forma de equilíbrio. O robô ainda consegue movimento em grande escala (macro) usando os backbones secundários tubulares rigidamente fixados ao disco vermelho superior. Por atuação direta, empurrando e puxando sobre eles, a configuração contínua do robô muda. Crédito:Vanderbilt University
p Um novo robô contínuo projetado pelos engenheiros da Vanderbilt atinge o movimento em várias escalas e pode abrir um enorme mundo de microcirurgias complexas antes impossíveis. p O robô é capaz de fornecer um grande espaço de trabalho de macro movimento conforme necessário para intervenção cirúrgica e um pequeno espaço de trabalho de micro movimentos com resoluções de movimento de 1 mícron ou menos. Para ter uma noção de escala, uma polegada contém 25, 400 mícrons. Um glóbulo vermelho humano tem cerca de oito mícrons de largura, o mesmo tamanho de algumas bactérias e significativamente menor do que a largura do cabelo humano médio.
p "Nosso projeto atinge resoluções de movimento de 1 mícron ou menos usando atuadores baratos. Essa reconfiguração - com custo mínimo adicional - poderia acelerar o desenvolvimento de uma nova classe de robôs cirúrgicos capazes de macro-movimento para intervenção cirúrgica e movimento em micro-escala para imagem ou intervenção em nível celular, "disse Nabil Simaan, professor de engenharia mecânica e diretor do Laboratório de Robótica Avançada e Aplicações de Mecanismos.
p "Isso expande muito as capacidades da robótica em cirurgia minimamente invasiva, " ele disse.
p A miniaturização e amplitude de movimento permitiriam controle preciso durante procedimentos em aneurismas complexos, veias e artérias minúsculas, nervos e as delicadas estruturas do olho, o ouvido interno e as cordas vocais. As aplicações potenciais incluem biópsias, a erradicação do tumor e a distribuição direcionada da droga no nível celular.
p Simaan e sua equipe adaptaram a arquitetura flexível de seu robô contínuo anterior para atuar em escala macro e micro, alterando a postura de equilíbrio do robô, que Simaan chama de robôs contínuos com modulação de equilíbrio, ou CREM.
Crédito:Vanderbilt University p A arquitetura flexível dos robôs de continuum anteriores alcançou um movimento semelhante a um verme para macromanipulação. O robô é segmentado com discos ou anéis como o corpo de uma minhoca. Cada disco é unido por pequenos backbones, ou tubos de atuação. Adicionando pequenos fios elásticos dentro dos tubos de atuação e movendo os fios para cima ou para baixo, o equilíbrio estático das placas muda, criando movimento na escala do micrômetro.
p "Esta nova classe de robôs fornecerá microprecisão ao percorrer caminhos sinuosos em macroescala até o local da operação. Os benefícios potenciais incluem a reconstrução exata do tecido e a erradicação cirúrgica completa de tumores, "disse Simaan, uma afiliada do Vanderbilt Institute for Surgery and Engineering.
p O robô usa backbones secundários tubulares para alcançar a grande escala de movimento. Ao empurrá-los e puxá-los, a configuração contínua do robô muda. A adição de fios que podem deslizar para dentro e para fora dos backbones tubulares permitiu à equipe de pesquisa modular a forma de equilíbrio.
p Adicionalmente, testes extensivos estão em andamento para a incorporação de tomografia de coerência óptica, que é efetivamente um "ultrassom óptico" que permite reflexos de imagem de dentro do tecido.
p Simaan e seus colegas, o estudante de graduação em engenharia mecânica Giuseppe Del Giudice, O professor assistente de pesquisa de oftalmologia e ciências visuais Jin-Hui Shen e a médica Karen M. Joos, Joseph N. e Barbara H. Ellis Family Professor of Ophthalmology, realizaram uma integração preliminar de uma sonda de OCT personalizada.
p O interesse de pesquisa particular de Joos é o uso de sondas de OCT em miniatura com ferramentas cirúrgicas robóticas para melhorar a visualização de procedimentos dentro do olho. A experiência de Del Giudice está no projeto e controle de robôs médicos micro-contínuos, especificamente micromanipulação para cirurgia oftálmica.
p Estender as capacidades de um robô contínuo padrão em termos de movimento em microescala e direcionamento pode ter um impacto profundo na microcirurgia, fornecendo destreza significativamente aumentada, controlabilidade e precisão para os cirurgiões ou mesmo o pioneirismo de procedimentos antes impossíveis, Disse Simaan.