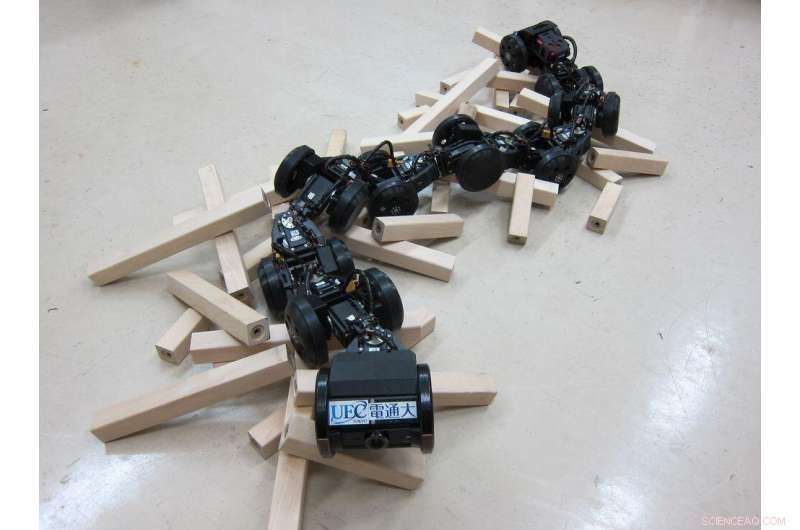
O robô semelhante a uma cobra T 2 Snake-3. Crédito:University of Electro Communications
Robôs móveis articulados semelhantes a cobras podem entrar em espaços estreitos e escalar obstáculos usando seus corpos longos e finos, e são eficazes para a inspeção de espaços estreitos e operação de busca e resgate em locais de desastre. Contudo, é difícil controlar seus movimentos precisos porque eles têm muitos atuadores.
Agora, Motoyasu Tanaka e colegas da Universidade de Eletrocomunicações de Tóquio, propor métodos para controlar robôs semelhantes a cobras para direção tridimensional, subir escadas e manipular objetos, e desenvolveram o robô semelhante a uma cobra T 2 Snake-3. Na direção tridimensional, o robô segue o terreno circundante relaxando suas articulações, e então volta a se mover da postura do robô. O operador pode controlar e mover facilmente o robô em terreno irregular por este método. Para subir escadas, o robô muda autonomamente seu movimento nas escadas da cabeça para a cauda no momento apropriado porque os dados dos sensores fixados na parte inferior do robô são usados para acionar o movimento. Para manipular um objeto, a posição e orientação da garra fixada na cabeça do robô são controladas mantendo a postura apropriada selecionando autonomamente a alocação das rodas levantadas / aterradas. Embora o robô T 2 Snake-3 tem aproximadamente trinta atuadores, o operador pode operar facilmente o robô usando esses métodos e um gamepad.
O robô T 2 Snake-3 entrou em espaços estreitos, escalando um degrau de um metro de altura, subindo escadas, e válvulas rotativas usando os métodos propostos. O robô em forma de cobra foi controlado de forma eficaz para equipamentos de inspeção e resposta a desastres.