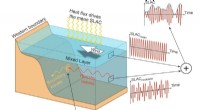
Varredura LiDAR única (esquerda), os dados sobrepostos (direita) com descrições (cores) fornecidas por um observador humano e o resultado do software (centro). Crédito:AG Computer Vision der Universität Bonn
Bons motoristas antecipam situações perigosas e ajustam sua direção antes que as coisas fiquem perigosas. Pesquisadores da Universidade de Bonn agora também querem ensinar essa habilidade para carros autônomos. Eles apresentarão um algoritmo correspondente na Conferência Internacional de Visão Computacional que será realizada na sexta-feira, 1 de Novembro, em Seul. Eles também apresentarão um conjunto de dados que usaram para treinar e testar sua abordagem. Isso tornará muito mais fácil desenvolver e melhorar esses processos no futuro.
Uma rua vazia, uma fila de carros estacionados ao lado:nada que indique que você deva ter cuidado. Mas espere:não há uma rua lateral à frente, meio coberto pelos carros estacionados? Talvez seja melhor eu tirar o pé do acelerador - quem sabe se alguém está vindo de lado. Constantemente encontramos situações como essas enquanto dirigimos. Interpretá-los corretamente e tirar as conclusões certas requer muita experiência. Em contraste, carros autônomos às vezes se comportam como um motorista aprendiz em sua primeira lição. "Nosso objetivo é ensinar-lhes um estilo de direção mais antecipado, "explica o cientista da computação Prof. Dr. Jürgen Gall." Isso permitiria que eles reagissem muito mais rapidamente a situações perigosas. "
Gall preside o grupo de trabalho "Visão Computacional" da Universidade de Bonn, que, em cooperação com seus colegas universitários do Instituto de Fotogrametria e do grupo de trabalho "Sistemas Inteligentes Autônomos", está pesquisando uma solução para este problema. Os cientistas agora apresentam um primeiro passo no caminho para este objetivo no simpósio líder da disciplina de Gall, a Conferência Internacional sobre Visão Computacional em Seul. "Refinamos um algoritmo que completa e interpreta os chamados dados LiDAR, "ele explica." Isso permite que o carro antecipe os perigos potenciais em um estágio inicial. "
Problema:poucos dados
LiDAR é um laser rotativo montado no teto da maioria dos carros autônomos. O feixe de laser é refletido pelos arredores. O sistema LiDAR mede quando a luz refletida incide sobre o sensor e usa esse tempo para calcular a distância. “O sistema detecta a distância em torno de 120, 000 pontos em torno do veículo por revolução, "diz Gall.
O problema com isso:os pontos de medição tornam-se "diluídos" à medida que a distância aumenta - a lacuna entre eles aumenta. É como pintar um rosto em um balão:quando você o infla, os olhos se afastam cada vez mais. Mesmo para um ser humano, é, portanto, quase impossível obter uma compreensão correta dos arredores de uma única varredura LiDAR (ou seja, as medições de distância de uma única revolução). "Alguns anos atrás, a Universidade de Karlsruhe (KIT) registrou grandes quantidades de dados LiDAR, um total de 43, 000 varreduras, "explica o Dr. Jens Behley, do Instituto de Fotogrametria." Agora pegamos sequências de várias dezenas de varreduras e as sobrepomos. "Os dados obtidos dessa forma também contêm pontos que o sensor só registrou quando o carro já havia dirigido alguns dezenas de metros adiante na estrada. Simplificando, eles mostram não só o presente, mas também o futuro.
"Essas nuvens de pontos sobrepostas contêm informações importantes, como a geometria da cena e as dimensões espaciais dos objetos que ela contém, que não estão disponíveis em uma única varredura, "enfatiza Martin Garbade, que atualmente está fazendo seu doutorado no Instituto de Ciência da Computação. "Além disso, rotulamos cada ponto neles, por exemplo:há uma calçada, há um pedestre e atrás há um motociclista. "Os cientistas alimentaram seu software com um par de dados:uma única varredura LiDAR como entrada e os dados de sobreposição associados, incluindo informações semânticas como saída desejada. Eles repetiram esse processo para vários milhares desses pares.
“Durante esta fase de treinamento, o algoritmo aprendeu a completar e interpretar varreduras individuais, "explica o Prof. Gall." Isso significava que poderia plausivelmente adicionar medições ausentes e interpretar o que foi visto nas varreduras. "A conclusão da cena já funciona relativamente bem:o processo pode completar cerca de metade dos dados ausentes corretamente. A interpretação semântica, ou seja, deduzir quais objetos estão escondidos atrás dos pontos de medição, não funciona tão bem:aqui, o computador atinge uma precisão máxima de 18 por cento.
Contudo, os cientistas consideram este ramo de pesquisa ainda em sua infância. "Até agora, simplesmente tem havido uma falta de conjuntos de dados extensos com os quais treinar métodos de inteligência artificial correspondentes, "frisa Gall." Estamos fechando uma lacuna aqui com o nosso trabalho. Estou otimista de que seremos capazes de aumentar significativamente a taxa de precisão na interpretação semântica nos próximos anos. "Ele considera que 50 por cento é bastante realista, o que pode ter uma grande influência na qualidade da direção autônoma.