Crédito CC0:domínio público
Uma equipe de pesquisadores australianos projetou uma estratégia confiável para testar as habilidades físicas de robôs humanóides - robôs que se assemelham ao formato do corpo humano em sua construção e design. Usando uma combinação de métodos e algoritmos de aprendizado de máquina, a equipe de pesquisa conseguiu permitir que os robôs de teste reagissem efetivamente a mudanças desconhecidas no ambiente simulado, melhorando suas chances de funcionar no mundo real.
As evidências, que foram publicados em uma publicação conjunta do IEEE e da Associação Chinesa de Automação Journal of Automatica Sinica em julho, têm implicações promissoras no amplo uso de robôs humanóides em áreas como saúde, Educação, resposta a desastres e entretenimento.
"Os robôs humanóides têm a capacidade de se mover de várias maneiras e, assim, imitar os movimentos humanos para concluir tarefas complexas. Para ser capaz de fazer isso, sua estabilidade é essencial, especialmente em condições dinâmicas e imprevisíveis, "disse o autor correspondente Dacheng Tao, Professor e ARC Laureate Fellow na Escola de Ciência da Computação e na Faculdade de Engenharia da Universidade de Sydney.
"Nós projetamos um método que ensina robôs humanóides de forma confiável a serem capazes de realizar essas tarefas, "adicionou Tao, que também é o Diretor Inaugural do UBTECH Sydney Artificial Intelligence Centre.
Robôs humanóides são robôs que se assemelham aos atributos físicos dos humanos - a cabeça, um torso, e dois braços e pés - e possuem a capacidade de se comunicar com humanos e outros robôs. Equipado com sensores e outros dispositivos de entrada, esses robôs também realizam atividades limitadas de acordo com a entrada externa.
Eles são normalmente pré-programados para atividades específicas e contam com dois tipos de métodos de aprendizagem:baseado em modelo e sem modelo. O primeiro ensina a um robô um conjunto de modelos que ele pode usar para se comportar em um cenário, enquanto o último não. Embora ambos os métodos de aprendizagem tenham tido sucesso até certo ponto, cada paradigma sozinho não se mostrou suficiente para equipar um robô humanóide para se comportar em um cenário do mundo real, onde o ambiente muda constantemente e muitas vezes de forma imprevisível.
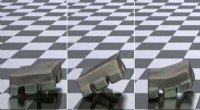
Para superar isso, Tao e sua equipe introduziram uma nova estrutura de aprendizado que incorpora partes do aprendizado baseado e sem modelo para equilibrar um bípede, ou de duas pernas, robô. O método de controle proposto preenche a lacuna entre os dois paradigmas de aprendizagem, onde a transição do aprendizado do modelo para o aprendizado do procedimento real foi concluída sem problemas. Os resultados da simulação mostram que o algoritmo proposto é capaz de estabilizar o robô em uma plataforma móvel sob rotações desconhecidas. Como tal, esses métodos demonstram que os robôs são capazes de se adaptar a diferentes situações imprevisíveis e, portanto, podem ser aplicados a robôs fora do ambiente de laboratório.
No futuro, os pesquisadores esperam validar seu método em ambientes mais complexos com variáveis mais imprevisíveis e variáveis e com dimensões variadas enquanto testam as habilidades dos robôs para exercer o controle total do corpo.
"Nosso objetivo final será ver como nosso método permite que o robô tenha controle sobre todo o seu corpo, à medida que é exposto a perturbações incomensuráveis e inesperadas, como um terreno em mutação. Também gostaríamos de ver a capacidade do robô de aprender a imitar movimento humano, como o movimento da articulação do tornozelo, sem ter recebido informação prévia. "