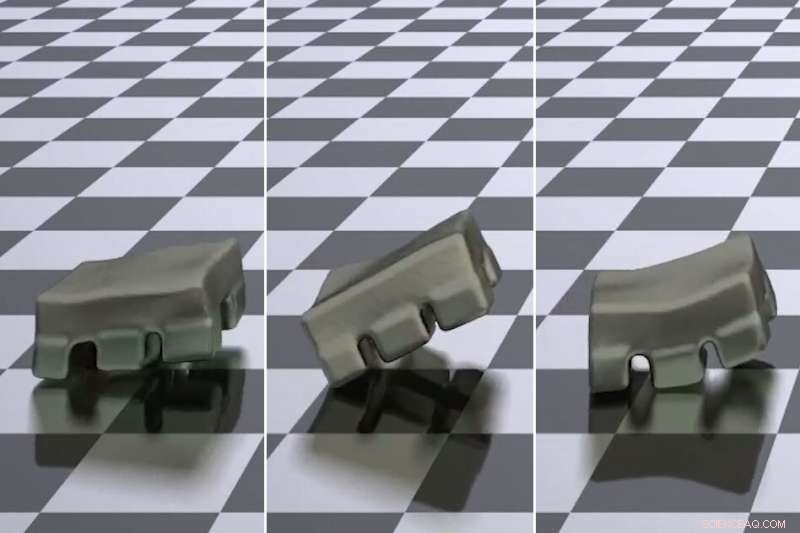
Um modelo inventado pelo MIT otimiza de forma eficiente e simultânea o controle e o design de robôs soft para tarefas específicas, que tradicionalmente tem sido um empreendimento monumental na computação. O modelo, por exemplo, foi significativamente mais rápido e preciso do que os métodos de última geração na simulação de como os robôs quadrúpedes (retratados) deveriam se mover para alcançar os destinos alvo. Crédito:Andrew Spielberg, Daniela Rus, Wojciech Matusik, Allan Zhao, Tao Du, e Yuanming Hu
Os pesquisadores do MIT inventaram uma maneira de otimizar de forma eficiente o controle e o design de robôs soft para tarefas específicas, que tradicionalmente tem sido um empreendimento monumental na computação.
Robôs suaves têm elástico, flexível, corpos elásticos que podem essencialmente se mover em um número infinito de maneiras a qualquer momento. Computacionalmente, isso representa uma "representação de estado altamente complexa, "que descreve como cada parte do robô está se movendo. As representações de estado para robôs soft podem ter potencialmente milhões de dimensões, tornando difícil calcular a maneira ideal de fazer um robô completar tarefas complexas.
Na Conferência sobre Sistemas de Processamento de Informação Neural no próximo mês, os pesquisadores do MIT apresentarão um modelo que aprende um compacto, ou "de baixa dimensão, "representação de estado ainda detalhada, com base na física subjacente do robô e seu ambiente, entre outros fatores. Isso ajuda o modelo a co-otimizar iterativamente o controle de movimento e os parâmetros de design de material para tarefas específicas.
"Robôs macios são criaturas de dimensões infinitas que se dobram em um bilhão de maneiras diferentes a qualquer momento, "diz o primeiro autor Andrew Spielberg, Pós-graduando no Laboratório de Ciência da Computação e Inteligência Artificial (CSAIL). "Mas, em verdade, existem maneiras naturais de os objetos macios se curvarem. Descobrimos que os estados naturais dos robôs soft podem ser descritos de forma muito compacta em uma descrição de baixa dimensão. Otimizamos o controle e o projeto de robôs soft aprendendo uma boa descrição dos estados prováveis. "
Em simulações, o modelo permitiu que robôs soft 2-D e 3-D concluíssem tarefas - como mover certas distâncias ou alcançar um ponto-alvo - com mais rapidez e precisão do que os métodos atuais de última geração. Em seguida, os pesquisadores planejam implementar o modelo em robôs soft reais.
Juntando-se a Spielberg no papel estão os alunos de pós-graduação do CSAIL, Allan Zhao, Tao Du, e Yuanming Hu; Daniela Rus, diretor do CSAIL e o professor Andrew e Erna Viterbi de Engenharia Elétrica e Ciência da Computação; e Wojciech Matusik, professor associado do MIT em engenharia elétrica e ciência da computação e chefe do Grupo de Fabricação Computacional.
"Learning-in-the-loop"
A robótica leve é um campo de pesquisa relativamente novo, mas é uma promessa para robótica avançada. Por exemplo, corpos flexíveis podem oferecer uma interação mais segura com os humanos, melhor manipulação de objetos, e mais manobrabilidade, entre outros benefícios.
O controle de robôs em simulações depende de um "observador, "um programa que calcula variáveis que veem como o robô macio está se movendo para completar uma tarefa. Em um trabalho anterior, os pesquisadores decomporam o robô macio em aglomerados de partículas simuladas feitos à mão. As partículas contêm informações importantes que ajudam a restringir os possíveis movimentos do robô. Se um robô tenta se curvar de uma certa maneira, por exemplo, os atuadores podem resistir a esse movimento o suficiente para que ele possa ser ignorado. Mas, para robôs tão complexos, escolher manualmente quais clusters rastrear durante as simulações pode ser complicado.
Construindo esse trabalho, os pesquisadores desenvolveram um método de "otimização de aprendizagem no circuito", onde todos os parâmetros otimizados são aprendidos durante um único ciclo de feedback em muitas simulações. E, ao mesmo tempo que a otimização da aprendizagem - ou "in the loop" - o método também aprende a representação do estado.
O modelo emprega uma técnica chamada método de ponto material (MPM), que simula o comportamento de partículas de materiais contínuos, como espumas e líquidos, cercado por uma grade de fundo. Ao fazer isso, ele captura as partículas do robô e seu ambiente observável em pixels ou pixels 3-D, conhecidos como voxels, sem a necessidade de qualquer cálculo adicional.
Em uma fase de aprendizagem, esta informação bruta da grade de partículas é alimentada em um componente de aprendizado de máquina que aprende a inserir uma imagem, comprimi-lo para uma representação de baixa dimensão, e descompacte a representação de volta na imagem de entrada. Se este "autoencoder" retém detalhes suficientes ao comprimir a imagem de entrada, ele pode recriar com precisão a imagem de entrada da compressão.
No trabalho dos pesquisadores, as representações compactadas aprendidas do autoencoder servem como a representação de estado de baixa dimensão do robô. Em uma fase de otimização, que a representação compactada retorna ao controlador, que produz uma atuação calculada de como cada partícula do robô deve se mover na próxima etapa simulada por MPM.
Simultaneamente, o controlador usa essa informação para ajustar a rigidez ideal para cada partícula para atingir seu movimento desejado. No futuro, que as informações materiais podem ser úteis para soft robôs de impressão 3D, onde cada ponto de partícula pode ser impresso com rigidez ligeiramente diferente. "Isso permite a criação de projetos de robôs voltados para os movimentos do robô que serão relevantes para tarefas específicas, "Spielberg diz." Aprendendo esses parâmetros juntos, você mantém tudo o mais sincronizado possível para tornar o processo de design mais fácil. "
Otimização mais rápida
Todas as informações de otimização são, por sua vez, realimentado no início do loop para treinar o codificador automático. Em muitas simulações, o controlador aprende o movimento ideal e o design do material, enquanto o autoencoder aprende a representação de estado cada vez mais detalhada. "A chave é que queremos que o estado de baixa dimensão seja muito descritivo, "Spielberg diz.
Depois que o robô chega ao seu estado final simulado ao longo de um determinado período de tempo - digamos, o mais próximo possível do destino alvo - ele atualiza uma "função de perda". Esse é um componente crítico do aprendizado de máquina, que tenta minimizar algum erro. Nesse caso, minimiza, dizer, quão longe o robô parou do alvo. Essa função de perda flui de volta para o controlador, que usa o sinal de erro para ajustar todos os parâmetros otimizados para melhor completar a tarefa.
Se os pesquisadores tentassem alimentar diretamente todas as partículas brutas da simulação no controlador, sem a etapa de compressão, "o tempo de execução e otimização explodiria, "Spielberg diz. Usando a representação compactada, os pesquisadores conseguiram diminuir o tempo de execução de cada iteração de otimização de vários minutos para cerca de 10 segundos.
Os pesquisadores validaram seu modelo em simulações de vários robôs bípedes e quadrúpedes 2-D e 3-D. Os pesquisadores também descobriram que, enquanto robôs que usam métodos tradicionais podem levar até 30, 000 simulações para otimizar esses parâmetros, robôs treinados em seu modelo levaram apenas cerca de 400 simulações.
Deploying the model into real soft robots means tackling issues with real-world noise and uncertainty that may decrease the model's efficiency and accuracy. Mas, no futuro, the researchers hope to design a full pipeline, from simulation to fabrication, for soft robots.