O sentido do tato é geralmente medido por um sensor que pode traduzir uma pressão sobre ele em um pequeno sinal elétrico. Crédito:Shutterstock
Temos robôs que podem andar, Vejo, falar e ouvir, e manipular objetos em suas mãos robóticas. Existe até um robô que pode cheirar mal.
Mas e quanto ao tato? É mais fácil falar do que fazer e existem limitações para alguns dos métodos atuais que estão sendo examinados, mas estamos desenvolvendo uma nova técnica que pode superar alguns desses problemas.
Para humanos, o toque desempenha um papel vital quando movemos nossos corpos. Tocar, combinado com a visão, é crucial para tarefas como pegar objetos - duros ou moles, leve ou pesado, quente ou frio - sem danificá-los.
No campo da manipulação robótica, em que uma mão ou pinça de robô tem que pegar um objeto, adicionar a sensação de toque pode remover as incertezas ao lidar com materiais macios, objetos frágeis e deformáveis.
A busca por uma pele inteligente
Quantificar o toque em termos de engenharia não requer apenas o conhecimento preciso da quantidade de força externa aplicada a um sensor de toque, mas você também precisa saber a posição exata da força, seu ângulo, e como ele irá interagir com o objeto que está sendo manipulado.
Depois, há a questão de quantos desses sensores um robô precisaria. O desenvolvimento de uma pele de robô que pode conter centenas ou até milhares de sensores de toque é uma tarefa desafiadora de engenharia.
Compreender os mecanismos físicos de detecção de toque no mundo biológico fornece ótimos insights quando se trata de projetar o equivalente robótico, uma pele inteligente.
Mas uma barreira significativa para o desenvolvimento de pele inteligente é a eletrônica necessária.
Força diária e medição de toque
O sentido do tato é geralmente medido por um sensor que pode traduzir a pressão em um pequeno sinal elétrico. Quando você usa uma balança digital para se pesar ou medir ingredientes em sua cozinha, as escalas provavelmente estão usando um transdutor piezoelétrico.
Este é um dispositivo que transforma uma força em eletricidade. A minúscula corrente elétrica do transdutor é então passada através de fios para um pequeno microchip que lê a força da corrente, converte isso em uma medição de peso significativa, e o exibe em uma tela.
Apesar de ser capaz de sentir diferentes níveis de força, esses dispositivos eletrônicos têm várias limitações que os tornam impraticáveis para uma pele inteligente. Em particular, eles têm um tempo de resposta relativamente lento à força.
Existem outros tipos de sensores de toque baseados em um material mudando suas outras características elétricas, como capacitância ou resistência. A tela do seu celular pode ter essa tecnologia incorporada, e se você usa um trackpad em seu computador, ele certamente usará sensores de toque.
Sensor de força suave e flexível
Nos últimos anos, houve um grande progresso na fabricação de sensores de toque que podem ser incorporados em materiais macios e flexíveis. Isso é exatamente o que precisamos para uma pele inteligente.
Mas muitos desses desenvolvimentos falham completamente (devido ao tipo de detecção) na presença de umidade. (Você já experimentou um dedo molhado na tela de toque do seu smartphone?)
As aplicações médicas são agora o principal impulsionador da demanda por detecção de força flexível e robusta. Por exemplo, A pele inteligente pode ser usada para restaurar o feedback sensorial em pacientes com lesões cutâneas ou neuropatia periférica (dormência ou formigamento). Também pode ser usado para dar às mãos protéticas a habilidade básica de detecção do toque.
Recentemente, pesquisadores do MIT e de Harvard desenvolveram uma luva tátil escalável e a combinaram com inteligência artificial. Sensores uniformemente distribuídos pela mão podem ser usados para identificar objetos individuais, estimar seu peso, e explore os padrões táteis típicos que surgem ao segurá-los.
Os pesquisadores criaram uma luva com 548 sensores montados em uma malha contendo um filme piezoresistivo (que também reage à pressão ou deformação) conectado por uma rede de eletrodos de fios condutores.
Esta é a primeira tentativa bem-sucedida de registrar esses sinais em grande escala, revelando informações importantes que podem ser usadas em projetos futuros de próteses e ferramentas de preensão de robôs.
Mas, assim como quase todas as outras interfaces de toque que são projetadas com capacitivas, técnicas resistivas ou piezoelétricas, esta tecnologia tátil não funciona bem com os dedos molhados ou debaixo d'água.
Sensor óptico de força no horizonte
Para resolver este problema, desenvolvemos uma nova forma de sensor tátil que usa filmes nanométricos de LEDs orgânicos (OLED) e fotodiodos orgânicos (OPD) para medir o toque suave.
A tecnologia OLED é normalmente encontrada em telas de televisão e smartphones. Nossa abordagem para medir a sensação do tato é baseada na detecção ótica de força.
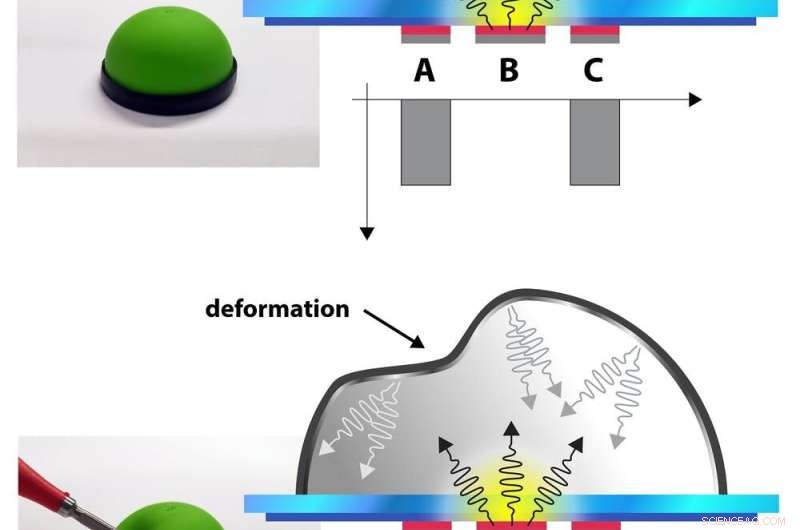
Um único elemento de toque formado por uma cúpula sobre alguns pixels OLED. Principal, quando nada toca a cúpula, uma quantidade igual de luz é refletida do pixel emissor de luz B, para os pixels de detecção de luz A e C. Parte inferior, quando algo toca a cúpula, é deformado e a quantidade de luz refletida muda entre os pixels A e C. Crédito:Ajay Pandey, Autor fornecido
Os elementos OLED (chamados diodos ou pixels) são totalmente reversíveis. Isso significa que, além de ser capaz de produzir luz (como em uma tela de TV), esses pixels também podem detectar luz.
Usando este princípio, podemos fabricar um minúsculo, opaco, cúpula flexível com um revestimento reflexivo que é colocado acima de alguns pixels de OLED. A luz emitida pelo pixel central é uniformemente distribuída em todos os outros pixels sob a cúpula, se a cúpula não for perturbada.
Mas se a cúpula for pressionada - tocando em algo - ela se deformará, resultando em uma resposta desigual dos pixels sendo usados para detectar a luz refletida. Combinando as respostas de dezenas dessas cúpulas na área de contato, será possível estimar a força sendo aplicada.
Esta abordagem é um passo significativo para simplificar o layout de pele inteligente para aplicações de grande área e esperamos ver em breve robôs que possam ter detecção de corpo inteiro no ar, quando molhado ou mesmo debaixo d'água.
Este artigo foi republicado de The Conversation sob uma licença Creative Commons. Leia o artigo original.