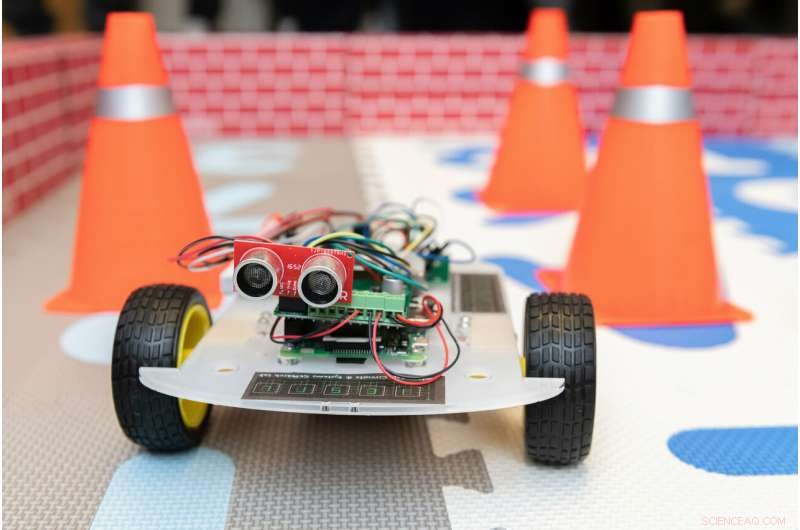
Um carro robótico controlado por um chip híbrido de ultra-baixa potência é mostrado em uma arena para demonstrar sua capacidade de aprender e colaborar com outro robô. Crédito:Allison Carter, Georgia Tech
Um chip híbrido de ultra-baixa potência inspirado no cérebro poderia ajudar a dar aos robôs do tamanho da palma da mão a capacidade de colaborar e aprender com suas experiências. Combinado com as novas gerações de motores e sensores de baixa potência, o novo circuito integrado de aplicação específica (ASIC) - que opera em miliwatts de potência - poderia ajudar os robôs de enxame inteligentes a operar por horas em vez de minutos.
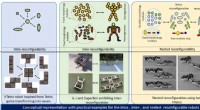
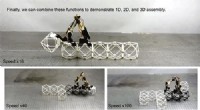
Para conservar energia, os chips usam um processador de domínio de tempo analógico-digital híbrido no qual a largura de pulso dos sinais codifica as informações. A rede neural IC acomoda programação baseada em modelo e aprendizado de reforço colaborativo, potencialmente fornecendo aos pequenos robôs maiores recursos para reconhecimento, busca e resgate e outras missões.
Pesquisadores do Instituto de Tecnologia da Geórgia demonstraram carros robóticos conduzidos por ASICs exclusivos na Conferência Internacional de Circuitos de Estado Sólido (ISSCC) do IEEE 2019. A pesquisa foi patrocinada pela Agência de Projetos de Pesquisa Avançada de Defesa (DARPA) e pela Semiconductor Research Corporation (SRC) por meio do Centro de Inteligência Autônoma Habilitante para Computação Inspirada no Cérebro (CBRIC).
"Estamos tentando trazer inteligência para esses robôs muito pequenos para que possam aprender sobre seu ambiente e se mover de forma autônoma, sem infraestrutura, "disse Arijit Raychowdhury, professor associado da Escola de Engenharia Elétrica e da Computação da Georgia Tech. "Para conseguir isso, queremos trazer conceitos de circuito de baixa potência para esses dispositivos muito pequenos para que possam tomar decisões por conta própria. Há uma grande demanda por produtos muito pequenos, mas robôs capazes que não requerem infraestrutura. "
Os carros demonstrados por Raychowdhury e os alunos de pós-graduação Ningyuan Cao, Muya Chang e Anupam Golder navegam por uma arena com piso de borracha e cercada por paredes de blocos de papelão. Enquanto procuram por um alvo, os robôs devem evitar cones de trânsito e uns aos outros, aprendendo com o ambiente à medida que avançam e se comunicando continuamente.
Os carros usam sensores inerciais e de ultrassom para determinar sua localização e detectar objetos ao seu redor. As informações dos sensores vão para o ASIC híbrido, que funciona como o "cérebro" dos veículos. As instruções vão para um controlador Raspberry Pi, que envia instruções aos motores elétricos.
Em robôs do tamanho da palma da mão, três sistemas principais consomem energia:os motores e controladores usados para conduzir e dirigir as rodas, o processador, e o sistema de detecção. Nos carros construídos pela equipe de Raychowdhury, o ASIC de baixa potência significa que os motores consomem a maior parte da potência. "Conseguimos reduzir o poder de computação a um nível em que o orçamento é dominado pelas necessidades dos motores, " ele disse.
A equipe está trabalhando com colaboradores em motores que utilizam tecnologia microeletromecânica (MEMS), capazes de operar com muito menos potência do que os motores convencionais.
"Gostaríamos de construir um sistema em que o poder de detecção, comunicações e poder do computador, e a atuação estão aproximadamente no mesmo nível, na ordem de centenas de miliwatts, "disse Raychowdhury, que é o ON Semiconductor Associate Professor na Escola de Engenharia Elétrica e de Computação. "Se pudermos construir esses robôs do tamanho da palma da mão com motores e controladores eficientes, devemos ser capazes de fornecer durações de várias horas com algumas baterias AA. Agora temos uma boa ideia de que tipo de plataforma de computação precisamos para entregar isso, mas ainda precisamos que os outros componentes o atualizem. "
Na computação no domínio do tempo, a informação é transportada em duas tensões diferentes, codificado na largura dos pulsos. Isso dá aos circuitos as vantagens de eficiência energética dos circuitos analógicos com a robustez dos dispositivos digitais.
"O tamanho do chip é reduzido pela metade, e o consumo de energia é um terço do que um chip digital tradicional precisaria, " said Raychowdhury. "We used several techniques in both logic and memory designs for reducing power consumption to the milliwatt range while meeting target performance."
With each pulse-width representing a different value, the system is slower than digital or analog devices, but Raychowdhury says the speed is sufficient for the small robots. (A milliwatt is a thousandth of a watt).
Two robotic cars controlled by an ultra-low power hybrid chip are shown in a test arena where they will demonstrate an ability to learn and collaborate. Crédito:Allison Carter, Georgia Tech
"For these control systems, we don't need circuits that operate at multiple gigahertz because the devices aren't moving that quickly, " he said. "We are sacrificing a little performance to get extreme power efficiencies. Even if the compute operates at 10 or 100 megahertz, that will be enough for our target applications."
The 65-nanometer CMOS chips accommodate both kinds of learning appropriate for a robot. The system can be programmed to follow model-based algorithms, and it can learn from its environment using a reinforcement system that encourages better and better performance over time—much like a child who learns to walk by bumping into things.
"You start the system out with a predetermined set of weights in the neural network so the robot can start from a good place and not crash immediately or give erroneous information, " Raychowdhury said. "When you deploy it in a new location, the environment will have some structures that it will recognize and some that the system will have to learn. The system will then make decisions on its own, and it will gauge the effectiveness of each decision to optimize its motion."
Communication between the robots allow them to collaborate to seek a target.
"In a collaborative environment, the robot not only needs to understand what it is doing, but also what others in the same group are doing, " he said. "They will be working to maximize the total reward of the group as opposed to the reward of the individual."
With their ISSCC demonstration providing a proof-of-concept, the team is continuing to optimize designs and is working on a system-on-chip to integrate the computation and control circuitry.
"We want to enable more and more functionality in these small robots, " Raychowdhury added. "We have shown what is possible, and what we have done will now need to be augmented by other innovations."