Nós vamos, cada um ao seu gosto. Gatinhos que fazem amizade com novelos de lã são ímãs absolutos para surfistas de vídeo, mas um exército rival de clickters de vídeo nunca consegue olhar para humanóides navegando para onde querem ir.
O último vídeo mostrando robôs humanóides em movimento está impressionando os espectadores com a maneira hábil e bem-sucedida com que navegam em um labirinto de blocos de concreto.
O vídeo deste último é IHMC, o Instituto de Cognição Humana e de Máquina (IHMC).
"Para caminhar por um ambiente desordenado e complicado, "disse a equipe, robôs com pernas precisam descobrir onde podem colocar seus pés. Desafio adicionado:isso precisa ser feito rapidamente, se o terreno é plano ou complexo.
O programa de planejamento autônomo de passos do IHMC está em funcionamento no robô da Boston Dynamics, e Valkyrie desenvolvido pela NASA.
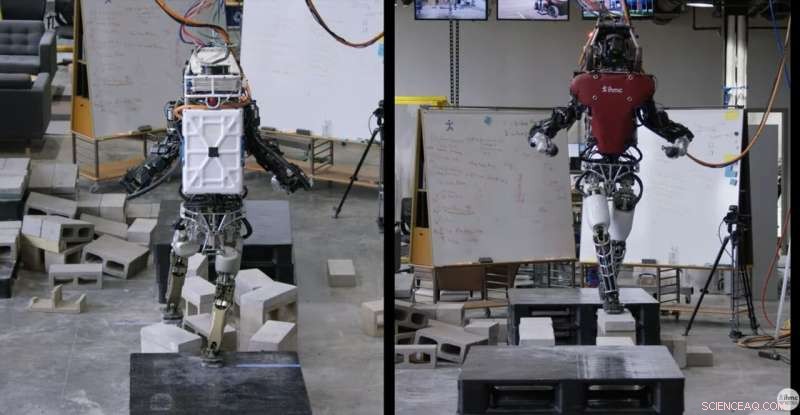
A equipe usou os dois robôs, o Atlas (Boston Dynamics) e o Valkyrie (NASA Johnson Space Center) para a vitrine mais recente. Outra característica importante era sua 'cabeça'.
"O método usa os sensores das máquinas para descobrir o caminho mais eficiente para um local selecionado por humanos, " disse TNW.
"Neste vídeo, "disse o narrador, "usamos o cabeçote Carnegie Robotics MultiSense SL para gerar nuvem de pontos do ambiente. Ao segmentar essa nuvem de pontos em regiões planas, representamos a enorme quantidade de dados provenientes dos sensores de percepção de uma forma muito mais compacta. "
Eles decompuseram ainda mais essas regiões planas em uma coleção de polígonos. Engadget :"Cada seção é então interpretada em uma série de polígonos para criar um modelo do ambiente, para que o robô possa planejar cada uma de suas etapas para ir do ponto de partida até o objetivo. "
A equipe IHMC, durante o desafio DARPA, já havia usado o robô Atlas. Atlas dirigido por um operador. Passos foram colocados na interface. O processo era lento e sobrecarregava o operador. Outra desvantagem era que a colocação de pegadas individuais era propensa a erros. Atlas caiu no primeiro dia da competição final.
Desta vez, para contornar o erro humano, o novo sistema permite que um operador selecione o local desejado, disse TNW , "mas, em última análise, depende de um algoritmo para descobrir como levar o robô até lá e evitar obstáculos."
"Basicamente, O IHMC gerencia essas operações de navegação complexas, especificando um ponto inicial e final para o robô, "disse Darrell Etherington em TechCrunch , "e, em seguida, mapeando todos os caminhos possíveis passo a passo, avaliar o custo de cada um e, por fim, chegar ao melhor caminho possível - tudo o que pode ocorrer com relativa rapidez no hardware moderno. "
Em uma cena de vídeo de teste, mostra a equipe fazendo o robô andar por um conjunto de blocos de concreto, onde há apenas alguns apoios para os pés possíveis. Eles também podem planejar caminhos onde o robô não tem escolha a não ser usar apenas apoios para os pés parciais.
Atualmente, eles disseram em suas notas de vídeo, terreno estreito tem uma taxa de sucesso de cerca de 50 por cento, terreno acidentado é cerca de 90 por cento, enquanto o terreno plano está perto de 100 por cento.
Pittsburgh, Carnegie Robotics, com sede na Pensilvânia, Enquanto isso, é um fornecedor de plataformas e sensores avançados de robótica. O MultiSense SL original foi o sensor escolhido pelos robôs humanóides Atlas no DARPA Robotics Challenge (DRC). Como cabeça humanóide, o SL forneceu a maioria dos dados perceptuais usados para teleoperação, bem como controle automatizado.
Qual é o próximo?
"Planejamos aumentar a velocidade do planejador e a capacidade de planejar através de labirintos e atingir objetivos invisíveis, "disseram nas notas do vídeo.
É claro que a equipe continua tentando conquistar a caminhada bípede.
A equipe do IHMC afirmou isso.
"Nossos projetos humanóides estão focados em levar nossas capacidades humanóides bípedes adiante para lidar com terrenos acidentados, sem qualquer conhecimento do ambiente de sensores a bordo ... Também estamos nos concentrando na capacidade de lidar de forma robusta com distúrbios externos. Nosso objetivo é lidar com cada vez mais difícil desafios de caminhada. "
O vídeo e o artigo foram submetidos ao evento Humanoids 2019 - International Conference on Humanoid Robots que acontecerá ainda este ano.
© 2019 Science X Network














