Um robô aquático macio, inspirado por um peixe-leão e projetado por James Pikul, ex-pesquisador de pós-doutorado no laboratório de Rob Shepherd, professor assistente de engenharia mecânica e aeroespacial. Crédito:Cornell University
Robôs sem amarras sofrem de um problema de resistência. Uma solução possível:um líquido circulante - "sangue de robô" - para armazenar energia e alimentar suas aplicações para aplicações sofisticadas, tarefas de longa duração.
Os humanos e outros organismos complexos administram a vida por meio de sistemas integrados. Os humanos armazenam energia em reservas de gordura espalhadas por todo o corpo, e um intrincado sistema circulatório transporta oxigênio e nutrientes para alimentar trilhões de células.
Mas abra o capô de um robô desamarrado e as coisas ficam muito mais segmentadas:aqui está a bateria sólida e ali estão os motores, com sistemas de resfriamento e outros componentes espalhados por toda parte.
Os pesquisadores da Cornell criaram um sistema vascular sintético capaz de bombear um líquido hidráulico com alta densidade de energia que armazena energia, transmite força, opera apêndices e fornece estrutura, tudo em um design integrado.
"Na natureza, vemos por quanto tempo os organismos podem operar enquanto realizam tarefas sofisticadas. Os robôs não podem realizar feitos semelhantes por muito tempo, "disse Rob Shepherd, professor associado de engenharia mecânica e aeroespacial. "Nossa abordagem bioinspirada pode aumentar drasticamente a densidade de energia do sistema enquanto permite que os robôs soft permaneçam móveis por muito mais tempo."
Pastor, diretor do Organic Robotics Lab, é autor sênior de "Electrolytic Vascular Systems for Energy Dense Robots, "que foi publicado em 19 de junho em Natureza . O estudante de doutorado Cameron Aubin é o autor principal.
Os engenheiros contam com baterias de íon de lítio para seu denso potencial de armazenamento de energia. Mas as baterias sólidas são volumosas e apresentam restrições de design. Alternativamente, As baterias de fluxo redox (RFB) dependem de um ânodo sólido e católito altamente solúvel para funcionar. Os componentes dissolvidos armazenam energia até que ela seja liberada em uma redução química e oxidação, ou redox, reação.
Os robôs macios são principalmente fluidos - até cerca de 90% de fluido por volume, e muitas vezes usam líquido hidráulico. Usar esse fluido para armazenar energia oferece a possibilidade de aumentar a densidade de energia sem adicionar peso.
Os pesquisadores testaram o conceito criando um robô aquático macio inspirado em um peixe-leão, desenhado pelo co-autor James Pikul, um ex-pesquisador de pós-doutorado agora um professor assistente na Universidade da Pensilvânia. O peixe-leão usa nadadeiras ondulantes em forma de leque para planar em ambientes de recifes de coral (em um sacrifício à verossimilhança, os pesquisadores optaram por não adicionar nadadeiras venenosas como as contrapartes vivas dos robôs).
A pele de silicone na parte externa e os eletrodos flexíveis e uma membrana separadora de íons permitem que o robô se curve e flexione. Baterias de célula de fluxo de iodeto de zinco interconectadas alimentam bombas e componentes eletrônicos a bordo por meio de reações eletroquímicas. Os pesquisadores alcançaram densidade de energia igual a cerca de metade da bateria de íon-lítio Tesla Model S.
O robô nada usando a energia transmitida às aletas pelo bombeamento da bateria da célula de fluxo. O projeto inicial forneceu energia suficiente para nadar contra a corrente por mais de 36 horas.
A tecnologia RFB atual é normalmente usada em grandes, aplicações estacionárias, como o armazenamento de energia de fontes eólicas e solares. O projeto de RFB sofreu historicamente com baixa densidade de potência e voltagem operacional. Os pesquisadores superaram esses problemas conectando as células da bateria do ventilador em série, e maximizou a densidade de potência, distribuindo eletrodos por todas as áreas das aletas.
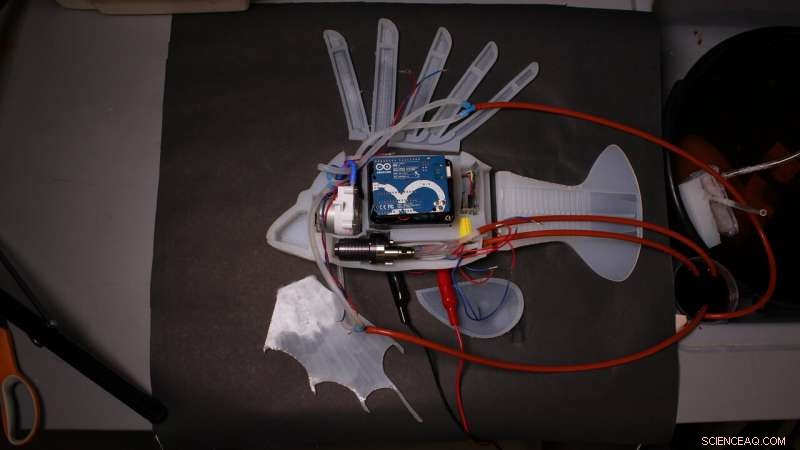
Vísceras eletrônicas de peixes robóticos macios, mostrando bombas, concha de silicone moldada com atuadores de aleta, microcontroladores, e vasculatura do católito. Crédito:James Pikul
“Queremos pegar o máximo de componentes de um robô e transformá-los no sistema de energia. Se você já tem líquidos hidráulicos em seu robô, então você pode aproveitar grandes reservas de energia e dar aos robôs mais liberdade para operar de forma autônoma, "Shepherd disse.
Robôs moles subaquáticos oferecem possibilidades tentadoras para pesquisa e exploração. Uma vez que robôs aquáticos moles são suportados por flutuabilidade, eles não requerem um exoesqueleto ou endoesqueleto para manter a estrutura. Ao projetar fontes de energia que dão aos robôs a capacidade de funcionar por longos períodos de tempo, Shepherd acredita que robôs autônomos poderão em breve estar vagando pelos oceanos da Terra em missões científicas vitais e para tarefas ambientais delicadas, como amostragem de recifes de coral. Esses dispositivos também podem ser enviados a mundos extraterrestres para missões de reconhecimento subaquático.