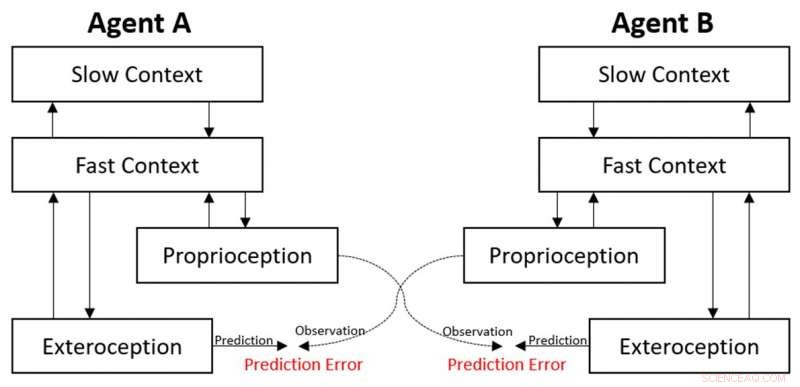
O modelo desenvolvido pelos pesquisadores. Crédito:Hwang, Wirkuttis e Tani.
Pesquisadores do Instituto de Ciência e Tecnologia de Okinawa recentemente propuseram uma abordagem neurorobótica que poderia auxiliar no desenvolvimento de robôs com recursos de comunicação avançados. A abordagem deles, apresentado em um artigo pré-publicado no arXiv, baseia-se em duas características principais:dinâmica neural estocástica e minimização de erro de predição (PEM).
"Nossa pesquisa se concentra amplamente na construção de robôs com base nos princípios-chave do cérebro, "Jungsik Hwang, um dos pesquisadores que realizou o estudo, disse TechXplore. "Neste estudo, focamos no princípio de minimização de erro de predição (PEM). A ideia principal é que o cérebro é uma máquina de previsão, fazer previsões de forma consistente e minimizar o erro de previsão quando uma previsão difere das observações. Essa teoria foi amplamente aplicada para explicar muitos aspectos dos comportamentos cognitivos. Neste estudo, tentamos examinar se este princípio pode ser aplicado a uma situação social. "
Nos últimos anos, pesquisadores realizaram vários estudos com o objetivo de replicar artificialmente as habilidades inatas de comunicação de muitos animais, incluindo humanos. Embora muitos desses estudos tenham alcançado resultados promissores, a maioria das soluções existentes não atinge uma precisão comparável aos humanos.
"Uma das tarefas desafiadoras para um robô com recursos de comunicação é reconhecer a intenção de outra pessoa por trás do comportamento observado, "Hwang explicou." Uma abordagem comum para resolver este problema é considerá-lo como uma tarefa de classificação. O objetivo então passa a ser obter o rótulo correto (intenção do usuário) com a observação dada (comportamento do usuário) usando o classificador. Nos dias de hoje, a escolha popular para esses classificadores são os modelos de rede neural profunda, como redes neurais convolucionais (CNNs) e memória de longo prazo (LSTM). "

Crédito:Hwang, Wirkuttis e Tani.
Em seu estudo, Hwang e seus colegas propuseram uma abordagem diferente para resolver esse problema com base na dinâmica neural estocástica e PEM. Os pesquisadores aplicaram sua abordagem a dois pequenos robôs humanóides, chamado ROBOTIS OP2, e o testei em diferentes situações que envolveram interações robô-homem e robô-robô.
"Usando nossa abordagem, o robô faz previsões consistentemente sobre o comportamento do agente com o qual está interagindo, "Disse Hwang." Quando uma previsão é diferente de sua observação, o robô atualiza sua crença para que a previsão correta possa ser feita (ou seja, minimizando o erro de previsão). Portanto, nesta abordagem, o reconhecimento de intenção não é uma tarefa de classificação, mas um processo ativo que envolve atualizar 'crenças' para entender o que aconteceu no passado recente. Em termos de aprendizado de máquina, isso pode ser considerado uma espécie de aprendizagem online. "
Em avaliações preliminares usando robôs humanóides, os pesquisadores descobriram que ser capaz de prever o comportamento dos outros e minimizar o erro de previsão desempenhou um papel fundamental em situações sociais. Usando sua abordagem, os robôs eram capazes de imitar as ações dos agentes com os quais interagiam; um usuário humano em configurações de HRI (interação homem-robô) e outro robô em configurações de RRI (interação robô-robô). Quando sua abordagem não foi aplicada aos robôs, por outro lado, as interações dos robôs com outros agentes foram marcadas por padrões mundanos e comportamentos repetitivos.

Crédito:Hwang, Wirkuttis e Tani.
“Por meio do mecanismo PEM, o robô pode não apenas se adaptar rapidamente a um ambiente em mudança, mas também prever o que vai acontecer no futuro, "Hwang explicou." Este método pode, portanto, ser aplicado a outros serviços de inteligência ambiental nos quais a IA faz previsões consistentemente sobre os usuários e se adapta a eles, ou mesmo proativamente fornece sugestões com base em observações anteriores. "
No futuro, a abordagem desenvolvida por Hwang e seus colegas pode informar o desenvolvimento de robôs com melhores capacidades de comunicação. Interessantemente, os pesquisadores também observaram que, quando dois robôs interagiam entre si usando sua abordagem, alguns padrões de comunicação novos e incomuns surgiram, sugerindo que sua abordagem permite um tipo de comunicação mais avançado.
"Ainda existem muitas direções de pesquisa interessantes que podem ser exploradas neste cenário, "Disse Hwang." Por exemplo, Estou interessado em fazer um teste de Turing gestual no qual um usuário interage com um robô que pode ser controlado por outra pessoa atrás da parede ou IA. Se não for possível identificar quem está operando o robô, podemos dizer que o robô tem inteligência para interagir com as pessoas? Que tipo de princípios do cérebro seriam essenciais para ilustrar a semelhança humana em tais ambientes sociais? Estas são algumas questões que gostaria de explorar no futuro. "
© 2019 Science X Network