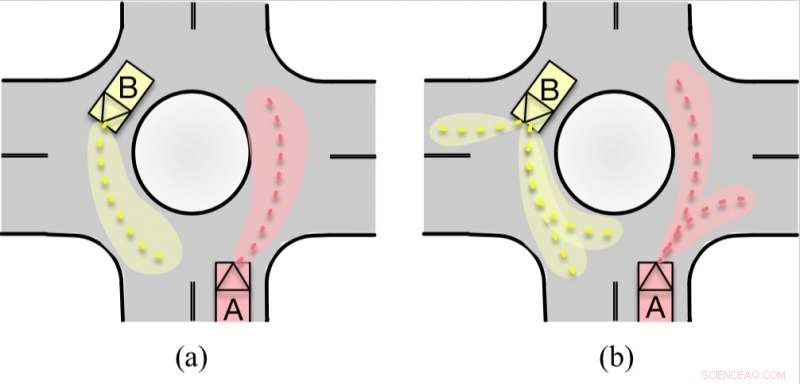
Demonstrações de (a) distribuições preditas monomodais e (b) multimodais. Crédito:Hu, Zhan e Tomizuka.
Pesquisadores da Universidade da Califórnia (UC), Berkeley, desenvolveram recentemente um modelo generativo que pode prever os movimentos sequenciais de pares de agentes interagindo, incluindo veículos autônomos, bem como veículos com motoristas humanos. Seu método, descrito em um artigo pré-publicado no arXiv, é interpretável, o que significa que ele pode explicar a lógica por trás de suas previsões, levando a uma maior confiabilidade e generalização.
"Para que os agentes autônomos operem com sucesso no mundo real, a capacidade de antecipar movimentos futuros de entidades vizinhas na cena pode aumentar muito seus níveis de segurança, permitindo-lhes evitar situações perigosas com antecedência, "Sim, Hu, um dos pesquisadores que realizou o estudo, disse TechXplore.
Estudos anteriores alcançaram resultados notáveis na previsão do comportamento de agentes ou veículos individuais. De acordo com Hu e seus colegas, Contudo, considerar esses agentes individualmente muitas vezes é inútil e limitante, como no mundo real (por exemplo, na estrada), esses agentes normalmente interagem entre si e seus estados são, portanto, acoplados. Além disso, conforme o horizonte previsto se expande, modelar incertezas de previsão e distribuições multimodais para sequências futuras torna-se cada vez mais desafiador.
"Em nosso estudo, abordamos este desafio apresentando uma abordagem de previsão probabilística multimodal, "Hu disse." O método proposto é baseado em um modelo generativo e é capaz de prever conjuntamente os movimentos sequenciais de cada par de agentes interagindo. "
Conforme explicado por Wei Zhan, outro pesquisador envolvido no estudo, essa previsão conjunta permite, em última análise, a previsão da reação dos movimentos de outros agentes. Pode fornecer uma resposta a perguntas do tipo "e se", como "Quais seriam as possíveis reações de outras pessoas se o veículo autônomo hospedeiro tomar uma ação específica no futuro?" A previsão de reação é extremamente importante para veículos autônomos em cenários de direção altamente interativos.
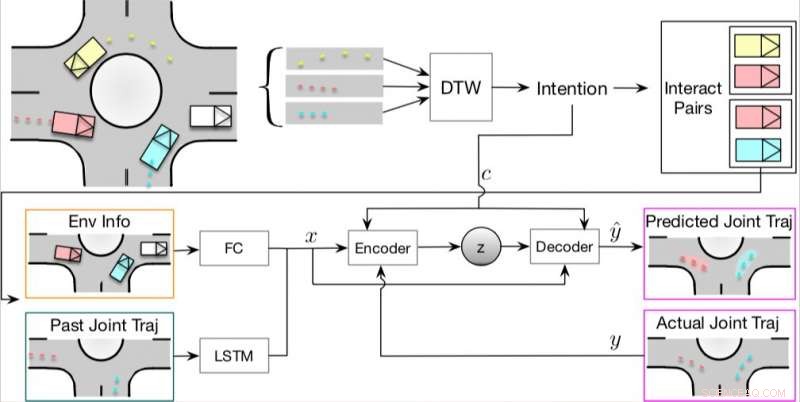
(a) A estrutura geral do método proposto. (b) Mapa de rotatória de todos os caminhos de referência. Crédito:Hu, Zhan e Tomizuka.
O modelo desenvolvido por Hu e seus colegas é baseado em um algoritmo chave, que tem uma estrutura semelhante aos autoencoders variacionais tradicionais (VAEs). Em seu estudo, os pesquisadores usaram seu modelo para prever os comportamentos interativos entre dois veículos, apelidado de A e B.
"A multimodalidade pode ser vista em aspectos discretos e contínuos, "Hu explicou." Pode haver muitos discretos, intenções de alto nível que são fixadas na mente de um humano, como virar à esquerda / direita ou sair em uma determinada faixa no cenário de rotatória. Também, sob cada intenção, existem várias interações contínuas, como diferentes graus de comportamento de passagem / rendimento. Portanto, é necessário abordar a multimodalidade quando estamos prevendo o comportamento futuro de outros veículos, o que pode nos levar a resultados de previsão mais precisos e razoáveis. "
Dados de movimento do mundo real em cenários de direção altamente interativos são o ativo e o pré-requisito mais importante para a pesquisa de predição de comportamento e movimento. Os pesquisadores usaram uma rotatória complexa de 7 vias com tráfego intenso para coletar grandes quantidades de dados de movimento altamente interativos.
Os dados coletados foram usados para treinar e avaliar o modelo proposto, produzindo resultados altamente promissores. Sua abordagem superou três modelos alternativos que são comumente usados para prever o movimento de agentes autônomos, a saber, VAE condicional, conjunto perceptron multicamadas (MLP) e dropout de Monte Carlo (MC). No futuro, seu laboratório também publicará um conjunto de dados de movimento mais abrangente.
"Em nosso trabalho recente, mostramos o raciocínio subjacente para o processo de amostragem dos resultados previstos, "Disse Hu." Embora ainda haja um longo caminho a percorrer para compreender totalmente esses algoritmos de caixa preta (ou seja, redes neurais), tentamos fornecer algumas informações significativas de tal algoritmo de caixa preta e tentamos tornar o algoritmo proposto seguro para uso. Se esses algoritmos de previsão forem usados em veículos autônomos reais um dia, raciocínio suficiente por trás do algoritmo de previsão será definitivamente necessário. "
O modelo desenvolvido por Hu e seus colegas pode ajudar a aumentar a segurança dos veículos autônomos, permitindo-lhes prever as interações entre outros veículos na estrada. Em seus próximos estudos, Hu planeja abordar ainda mais o lado da segurança do algoritmo de previsão, ao mesmo tempo que tenta tornar o processo de previsão mais transparente.
© 2019 Science X Network