Uma equipe de pesquisadores do Harbin Institute of Technology na China e da Michigan State University nos EUA desenvolveu uma maneira de controlar microrrobôs em enxame que podem se formar em vários tipos de formas. Em seu artigo publicado na revista Ciência Robótica , o grupo descreve seus minúsculos robôs, o que eles podem fazer, e possíveis usos para eles.
Nas últimas décadas, cientistas e engenheiros têm trabalhado no desenvolvimento de robôs tão pequenos que podem nadar dentro de um corpo vivo. Acredita-se que algum dia, esses robôs serão capazes de entregar drogas a alvos no corpo, ou talvez ficar no corpo, trabalhando em conjunto com o sistema imunológico para prevenir doenças. Neste novo esforço, os pesquisadores deram mais um passo nessa direção ao desenvolver uma maneira de controlar um enxame de minúsculos robôs que os configura em vários tipos de formas.
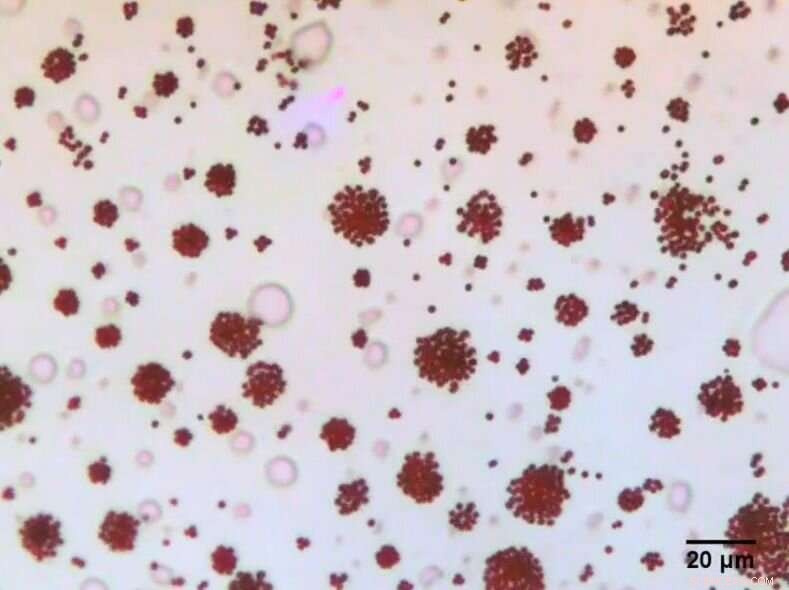
Os pesquisadores notaram que até agora, engenheiros desenvolveram pequenos robôs que se formam e operam em enxames, mas apenas em uma única forma - limitando sua utilidade. Os pesquisadores que trabalham na China relatam que seus minúsculos robôs foram capazes de se formar em quatro formas diferentes de enxame - líquido, fita, corrente e vórtice. E qualquer um deles pode ser formado sob demanda.
Os robôs nos experimentos eram na verdade apenas grãos únicos de hematita - eles foram suspensos em um líquido e manipulados com ímãs especializados. Ao controlar a frequência e a direção do campo magnético, os pesquisadores conseguiram fazer com que cada robô girasse, lista, oscilar e tombar independentemente. Quando o campo magnético foi controlado por todo um grupo de robôs, o resultado foi um enxame controlável.
Os pesquisadores apontam que, para ir de uma parte do corpo a outra, um enxame precisaria ser capaz de se moldar em diferentes configurações. Movendo-se por um órgão como o estômago, por exemplo, pode exigir um enxame simplesmente para se mover como uma massa. Movendo-se por um canal, por outro lado, exigiria formas como uma corrente, cobra ou verme. E mover a carga dentro do corpo exigiria que um enxame se unisse em uma forma como um vórtice para uma contenção coletiva.
© 2019 Science X Network