Um robô macio, preso a um balão e submerso em uma coluna de água transparente, mergulhos e superfícies, então mergulha e sobe novamente, como um peixe perseguindo moscas. Os robôs soft já executaram esse tipo de truque antes. Mas, ao contrário da maioria dos robôs soft, este é feito e operado sem peças rígidas ou eletrônicas. Dentro, Um leve, O computador de borracha informa ao balão quando subir ou descer. Pela primeira vez, este robô depende exclusivamente da lógica digital soft.
Na última década, robôs suaves surgiram no mundo da robótica com predominância de metal. Pinças feitas de materiais de silicone com borracha já são usadas em linhas de montagem:garras acolchoadas lidam com frutas e vegetais delicados como tomates, salsão, e links de salsicha, ou extraia garrafas e suéteres de caixas. Em laboratórios, as garras podem pegar peixes escorregadios, ratos vivos, e até mesmo insetos, eliminando a necessidade de mais interação humana.
Os robôs soft já requerem sistemas de controle mais simples do que seus equivalentes físicos. As garras são tão compatíveis, eles simplesmente não podem exercer pressão suficiente para danificar um objeto e sem a necessidade de calibrar a pressão, um simples interruptor liga-desliga é suficiente. Mas até agora, a maioria dos robôs soft ainda dependem de algum hardware:válvulas de metal abrem e fecham canais de ar que operam as garras e braços de borracha, e um computador diz a essas válvulas quando se mover.
Agora, pesquisadores construíram um computador macio usando apenas borracha e ar. "Estamos emulando o processo de pensamento de um computador eletrônico, usando apenas materiais macios e sinais pneumáticos, substituindo eletrônicos por ar pressurizado, "diz Daniel J. Preston, primeiro autor em um artigo publicado em PNAS e um pesquisador de pós-doutorado que trabalha com George Whitesides, o Woodford L. e Ann A. Flowers University Professor.
Tomar decisões, computadores usam portas lógicas digitais, circuitos eletrônicos que recebem mensagens (entradas) e determinam reações (saídas) com base em sua programação. Nosso circuito não é tão diferente:quando um médico atinge um tendão abaixo de nossa rótula (entrada), o sistema nervoso está programado para sacudir nossa perna (saída).
O computador soft de Preston imita esse sistema usando tubo de silicone e ar pressurizado. Para atingir os tipos mínimos de portas lógicas necessárias para operações complexas - neste caso, NÃO, E, e OU - ele programou as válvulas suaves para reagir a diferentes pressões de ar. Para a porta NÃO lógica, por exemplo, se a entrada for de alta pressão, a saída será de baixa pressão. Com essas três portas lógicas, Preston diz, "você pode replicar qualquer comportamento encontrado em qualquer computador eletrônico."
O robô balançando parecido com um peixe no tanque de água, por exemplo, usa um sensor de pressão ambiental (uma porta NOT modificada) para determinar que ação tomar. O robô mergulha quando o circuito detecta baixa pressão no topo do tanque e sobe quando detecta alta pressão em profundidade. O robô também pode emergir sob comando se alguém apertar um botão virtual externo.
Os robôs construídos apenas com peças macias têm vários benefícios. Em ambientes industriais, como fábricas de automóveis, máquinas de metal maciço operam com velocidade e potência cegas. Se um humano ficar no caminho, um robô rígido pode causar danos irreparáveis. Mas se um robô macio colidir com um humano, Preston diz, "você não teria que se preocupar com ferimentos ou uma falha catastrófica." Eles só podem exercer muita força.
Mas os robôs leves são mais do que apenas mais seguros:eles geralmente são mais baratos e mais simples de fazer, peso leve, resistente a danos e materiais corrosivos, e durável. Adicione inteligência e os robôs suaves podem ser usados para muito mais do que apenas manusear tomates. Por exemplo, um robô pode sentir a temperatura de um usuário e dar um aperto suave para indicar febre, alertar um mergulhador quando a pressão da água subir muito, ou empurre os escombros após um desastre natural para ajudar a encontrar as vítimas e oferecer ajuda.
Os robôs macios também podem se aventurar onde os eletrônicos lutam:campos altamente radiativos, como aqueles produzidos após um mau funcionamento nuclear ou no espaço sideral, e dentro de máquinas de imagem por ressonância magnética (MRI). Na sequência de um furacão ou inundação, um robô macio e resistente pode controlar terrenos perigosos e ar nocivo. "Se for atropelado por um carro, continua indo, que é algo que não temos com robôs rígidos, "Preston diz.
Preston e seus colegas não são os primeiros a controlar robôs sem eletrônicos. Outras equipes de pesquisa desenvolveram circuitos microfluídicos, que pode usar líquido e ar para criar portas lógicas não eletrônicas. Um oscilador microfluídico ajudou um robô macio em forma de polvo a sacudir os oito braços.
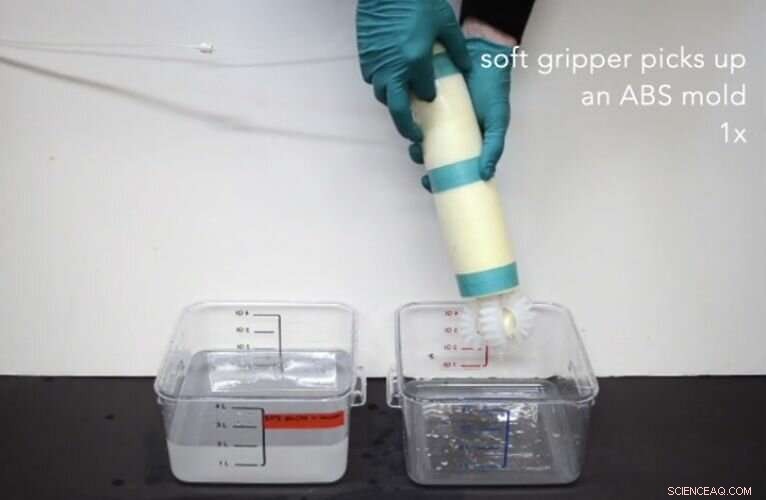
Ainda, circuitos lógicos microfluídicos muitas vezes dependem de materiais duros como vidro ou plásticos duros, e eles usam canais tão finos que apenas pequenas quantidades de ar podem passar por vez, retardando o movimento do robô. Em comparação, Os canais de Preston são maiores - cerca de um milímetro de diâmetro - o que permite taxas de fluxo de ar muito mais rápidas. Suas garras baseadas no ar podem agarrar um objeto em questão de segundos.
Os circuitos microfluídicos também são menos eficientes em termos de energia. Mesmo em repouso, os dispositivos usam um resistor pneumático, que flui o ar da atmosfera para uma fonte de vácuo ou pressão para manter a estase. Os circuitos de Preston não requerem entrada de energia quando dormentes. Essa conservação de energia pode ser crucial em situações de emergência ou desastre, onde os robôs viajam para longe de uma fonte de energia confiável.
Os robôs de borracha também oferecem uma possibilidade atraente:invisibilidade. Dependendo de qual material a Preston seleciona, ele poderia projetar um robô que é indexado a uma substância específica. Então, se ele escolhe um material que se camufla na água, o robô pareceria transparente quando submerso. No futuro, ele e seus colegas esperam criar robôs autônomos que sejam invisíveis a olho nu ou até mesmo à detecção por sonar. "É só uma questão de escolher os materiais certos, " ele diz.
Para Preston, os materiais certos são elastômeros (ou borrachas). Enquanto outros campos buscam maior poder com aprendizado de máquina e inteligência artificial, a equipe de Whitesides foge da complexidade crescente. "Há muitos recursos lá, "Preston diz, "mas também é bom dar um passo para trás e pensar se existe ou não uma maneira mais simples de fazer as coisas que dá o mesmo resultado, especialmente se não for apenas mais simples, também é mais barato. "