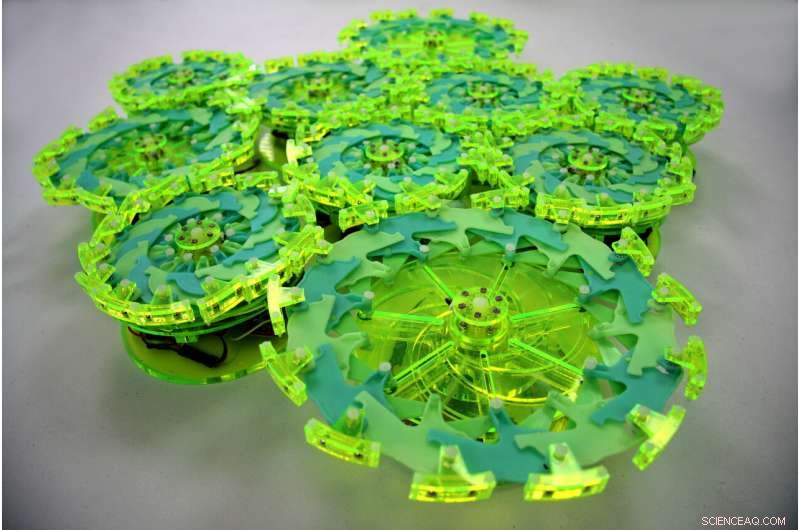
p Pesquisadores do MIT e de outros lugares desenvolveram robôs computacionalmente simples que se conectam em grandes grupos para se mover, objetos de transporte, e completar outras tarefas. Crédito:Felice Frankel
p Pesquisadores do MIT e de outros lugares desenvolveram robôs computacionalmente simples que se conectam em grandes grupos para se mover, objetos de transporte, e completar outras tarefas. Crédito:Felice Frankel
p Pegando uma sugestão de células biológicas, pesquisadores do MIT, Universidade Columbia, e em outros lugares desenvolveram robôs computacionalmente simples que se conectam em grandes grupos para se mover, objetos de transporte, e completar outras tarefas. p Este sistema chamado de "robótica de partículas" - com base em um projeto do MIT, Columbia Engineering, Cornell University, e pesquisadores da Universidade de Harvard - compreende muitas unidades individuais em forma de disco apropriadamente chamadas de "partículas". As partículas estão fracamente conectadas por ímãs ao redor de seus perímetros. Cada partícula pode fazer apenas duas coisas:expandir e contrair. Mas esse movimento, quando cronometrado cuidadosamente, permite que as partículas individuais se empurrem e puxem umas às outras em um movimento coordenado. Sensores integrados permitem que o cluster gravite em direção às fontes de luz.
p Em um
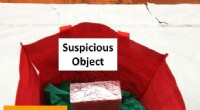
Natureza papel, os pesquisadores demonstram um cluster de duas dezenas de partículas robóticas reais e uma simulação virtual de até 100, 000 partículas movendo-se através de obstáculos em direção a uma lâmpada. Eles também mostram que um robô de partículas pode transportar objetos colocados em seu meio.
p Os robôs de partículas podem se formar em várias configurações e navegar com fluidez em torno de obstáculos e se espremer em espaços estreitos. Notavelmente, nenhuma das partículas se comunica diretamente ou depende uma da outra para funcionar, portanto, as partículas podem ser adicionadas ou subtraídas sem qualquer impacto no grupo. Em seu jornal, os pesquisadores mostram que os sistemas robóticos de partículas podem completar tarefas mesmo quando muitas unidades não funcionam bem.
p O artigo representa uma nova maneira de pensar sobre robôs, que são tradicionalmente projetados para um propósito, compreendem muitas partes complexas, e pare de trabalhar quando alguma peça apresentar defeito. Robôs compostos por esses componentes simplistas, os pesquisadores dizem, poderia permitir mais escalabilidade, flexível, e sistemas robustos.
Este vídeo mostra uma única célula oscilando em uma visão oblíqua e depois em uma visão superior. O vídeo também demonstra a locomoção do robô de partículas com um grupo de células oscilando com atraso de fase baseado em posição. p "Temos pequenas células de robô que não são tão capazes como indivíduos, mas podem realizar muito como um grupo, "diz Daniela Rus, diretor do Laboratório de Ciência da Computação e Inteligência Artificial (CSAIL) e os Professores Andrew e Erna Viterbi de Engenharia Elétrica e Ciência da Computação. "O robô por si só é estático, mas quando se conecta com outras partículas de robô, de repente, o coletivo de robôs pode explorar o mundo e controlar ações mais complexas. Com essas 'células universais, 'as partículas do robô podem atingir diferentes formas, transformação global, movimento global, comportamento global, e, como mostramos em nossos experimentos, siga gradientes de luz. Isso é muito poderoso. "
p Juntando-se à Rus no papel estão:primeiro autor Shuguang Li, um pós-doutorado em CSAIL; co-primeira autora Richa Batra e o autor correspondente Hod Lipson, ambos da Columbia Engineering; David Brown, Hyun-Dong Chang, e Nikhil Ranganathan de Cornell; e Chuck Hoberman de Harvard.
p No MIT, Rus tem trabalhado em módulos, robôs conectados por quase 20 anos, incluindo um robô de cubo em expansão e contração que poderia se conectar a outros para se mover. Mas a forma quadrada limitou o movimento e as configurações do grupo de robôs.
p Em colaboração com o laboratório de Lipson, onde Li era um estudante de graduação até vir para o MIT em 2014, os pesquisadores optaram por mecanismos em forma de disco que podem girar em torno um do outro. Eles também podem se conectar e desconectar um do outro, e formar em muitas configurações.
p Cada unidade de um robô de partículas tem uma base cilíndrica, que abriga uma bateria, um pequeno motor, sensores que detectam a intensidade da luz, um microcontrolador, e um componente de comunicação que envia e recebe sinais. Montado no topo está um brinquedo infantil chamado Hoberman Flight Ring - seu inventor é um dos co-autores do artigo - que consiste em pequenos painéis conectados em uma formação circular que pode ser puxada para expandir e empurrada para trás para se contrair. Dois pequenos ímãs são instalados em cada painel.
Este vídeo mostra o procedimento experimental para fototaxia de robôs de partículas, incluindo o período de redefinição de fase quando as luzes do teto são desligadas; isso geralmente é removido dos vídeos para reduzir a duração do vídeo e o tamanho do arquivo. Este vídeo também mostra os comportamentos demonstrados com a fototaxia, especificamente a locomoção para mudar as fontes de luz, transporte cooperativo de objetos, e prevenção de obstáculos; essas experiências correspondem às Fig. 3a-3c. p O truque era programar as partículas robóticas para expandir e contrair em uma sequência exata para empurrar e puxar todo o grupo em direção a uma fonte de luz de destino. Para fazer isso, os pesquisadores equiparam cada partícula com um algoritmo que analisa as informações transmitidas sobre a intensidade da luz de todas as outras partículas, sem a necessidade de comunicação direta de partícula a partícula.
p Os sensores de uma partícula detectam a intensidade da luz de uma fonte de luz; quanto mais perto a partícula está da fonte de luz, quanto maior a intensidade. Cada partícula transmite constantemente um sinal que compartilha seu nível de intensidade percebido com todas as outras partículas. Digamos que um sistema robótico de partículas mede a intensidade da luz em uma escala de níveis 1 a 10:as partículas mais próximas da luz registram um nível 10 e as mais distantes registram o nível 1. O nível de intensidade, por sua vez, corresponde a um tempo específico em que a partícula deve se expandir. As partículas que experimentam a intensidade mais alta - nível 10 - se expandem primeiro. Conforme essas partículas se contraem, as próximas partículas em ordem, nível 9, em seguida, expanda. Esse movimento cronometrado de expansão e contração ocorre em cada nível subsequente.
 p Os robôs de partículas são compostos de componentes fracamente acoplados, ou partículas, que carecem de uma identidade individual ou posição endereçável. Eles são capazes de apenas um simples movimento - expansão e contração. Contudo, quando um grupo de partículas é coordenado para se mover como um coletivo, comportamento interessante é observado. Mesmo em configurações amorfas, robôs de partículas exploram fenômenos de mecânica estatística para produzir locomoção. Crédito:Shuguang Li / Columbia Engineering
p Os robôs de partículas são compostos de componentes fracamente acoplados, ou partículas, que carecem de uma identidade individual ou posição endereçável. Eles são capazes de apenas um simples movimento - expansão e contração. Contudo, quando um grupo de partículas é coordenado para se mover como um coletivo, comportamento interessante é observado. Mesmo em configurações amorfas, robôs de partículas exploram fenômenos de mecânica estatística para produzir locomoção. Crédito:Shuguang Li / Columbia Engineering
p "Isso cria uma onda de expansão-contração mecânica, um movimento coordenado de empurrar e arrastar, que move um grande aglomerado para perto ou para longe dos estímulos ambientais, "Li diz. O principal componente, Li acrescenta, é o tempo preciso de um relógio sincronizado compartilhado entre as partículas que permite o movimento da forma mais eficiente possível:"Se você bagunçar o relógio sincronizado, o sistema funcionará com menos eficiência. "
p Em vídeos, os pesquisadores demonstram um sistema robótico de partículas que compreende partículas reais que se movem e mudam de direção em direção a diferentes lâmpadas à medida que são ligadas, e abrindo caminho através de uma lacuna entre obstáculos. Em seu jornal, os pesquisadores também mostram que agrupamentos simulados de até 10, 000 partículas mantêm a locomoção, na metade de sua velocidade, mesmo com até 20 por cento das unidades falharam.
p "É um pouco como o proverbial 'gosma cinza, '"diz Lipson, professor de engenharia mecânica na Columbia Engineering, referenciando o conceito de ficção científica de um robô autorreplicante que compreende bilhões de nanorrobôs. "A principal novidade aqui é que você tem um novo tipo de robô que não tem controle centralizado, nenhum ponto único de falha, sem forma fixa, e seus componentes não têm identidade única. "
p O próximo passo, Lipson acrescenta, está miniaturizando os componentes para fazer um robô composto por milhões de partículas microscópicas.