Uma nova abordagem "ambidestra" permite que os robôs agarrem uma grande variedade de objetos sem treinamento. Crédito:Adriel Olmos
O comércio eletrônico continua a se expandir e atingiu novos níveis durante as últimas férias. Para atender rapidamente ao enorme volume e variedade de pedidos, empresas como a Amazon, Walmart, e o Alibaba estão investindo pesadamente em novos depósitos. Para lidar com a escassez de trabalhadores, muitas empresas estão considerando robôs. Contudo, agarrar de forma confiável uma gama diversificada de produtos continua sendo um Grande Desafio para a robótica.
Em um artigo publicado na quarta-feira, 16 de janeiro no Ciência Robótica , engenheiros da Universidade da Califórnia, Berkeley apresenta um romance, abordagem "ambidestra" para compreender uma ampla gama de formas de objetos sem treinamento.
"Uma única garra não pode lidar com todos os objetos, "disse Jeff Mahler, pesquisador de pós-doutorado na UC Berkeley e autor principal do artigo. "Por exemplo, uma ventosa não pode criar uma vedação em objetos porosos, como roupas e garras paralelas podem não ser capazes de alcançar ambos os lados de algumas ferramentas e brinquedos. "
Mahler trabalha no laboratório de Ken Goldberg, um professor da UC Berkeley com nomeações conjuntas no Departamento de Engenharia Elétrica e Ciências da Computação e no Departamento de Engenharia Industrial e Pesquisa Operacional.
Os sistemas robóticos usados na maioria dos centros de distribuição de e-commerce contam com garras de sucção que podem limitar a gama de objetos que podem agarrar. O artigo da UC Berkeley apresenta uma abordagem "ambidestra" compatível com uma variedade de tipos de garras. A abordagem é baseada em uma "função de recompensa" comum para cada tipo de garra que quantifica a probabilidade de cada garra ter sucesso. Isso permite que o sistema decida rapidamente qual garra usar para cada situação. Para calcular com eficácia uma função de recompensa para cada tipo de garra, o artigo descreve um processo para aprender funções de recompensa por treinamento em grandes conjuntos de dados sintéticos gerados rapidamente usando randomização de domínio estruturado e modelos analíticos de sensores e a física e geometria de cada garra.
Quando os pesquisadores treinaram funções de recompensa para uma garra de mandíbula paralela e uma garra de ventosa em um robô de dois braços, eles descobriram que seu sistema esvaziava caixas com até 25 objetos não vistos anteriormente a uma taxa de mais de 300 escolhas por hora com 95 por cento de confiabilidade.
"Quando você está em um depósito juntando pacotes para entrega, objetos variam consideravelmente, "disse Goldberg." Precisamos de uma variedade de garras para lidar com uma variedade de objetos. "
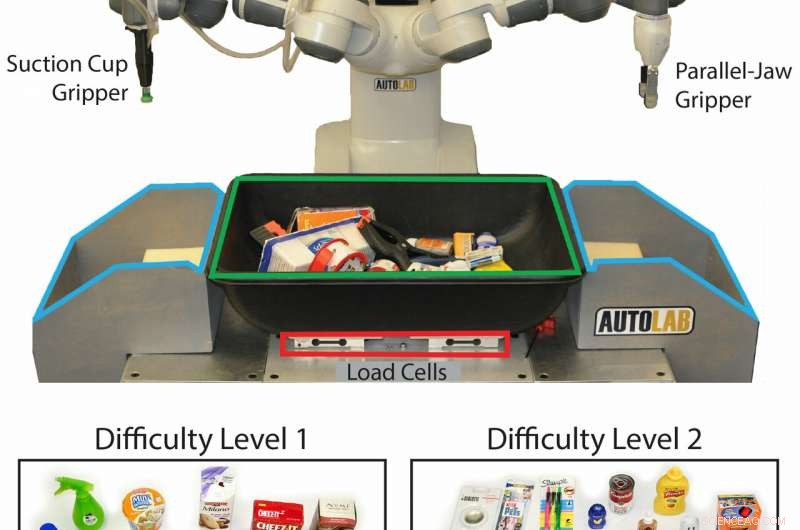
Configuração do robô ambidestro de dois braços e os objetos que ele tentou agarrar, categorizado em dois níveis de dificuldade. Crédito:Mahler et al., Sci. Robô. 4, eaau4984 (2019)