Um sistema de aprendizagem de imitação ponta a ponta para controle de velocidade de veículos autônomos
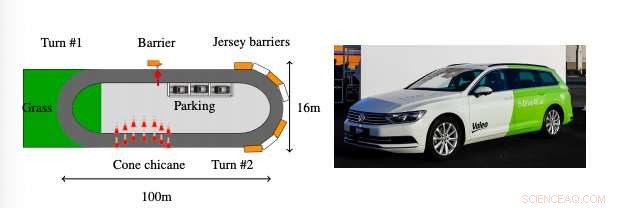 p Pista de teste (esquerda) e carro de demonstração usado (direita). Crédito:Wirbel et al.
p Pista de teste (esquerda) e carro de demonstração usado (direita). Crédito:Wirbel et al.
p Pesquisadores da Valeo, uma empresa de tecnologia especializada em inovação automotiva, desenvolveram recentemente um sistema de aprendizagem de imitação de ponta a ponta para o controle de velocidade do carro. A abordagem deles, descrito em um artigo pré-publicado no arXiv, usa uma rede neural com memória longa de curto prazo (LSTM), um tipo de rede neural recorrente (RNN) que pode aprender dependências de longo prazo. p "Valeo é líder mundial em sensores, os ouvidos e olhos dos carros autônomos, e já alcançou várias estreias mundiais, como a recente experimentação com nosso veículo Valeo Drive4U, o primeiro carro autônomo a ser demonstrado nas ruas de Paris, "Emilie Wirbel, um dos pesquisadores que realizou o estudo, disse TechXplore. "Minha equipe e eu trabalhamos em um dos 56 centros de pesquisa e desenvolvimento da empresa, investigando como o aprendizado profundo pode ser usado para alcançar uma melhor decisão e controle de carros autônomos. O objetivo desta pesquisa foi provar que é possível lidar com situações complexas que podem ser encontradas em ambientes urbanos usando apenas câmeras e aprendendo com o que um motorista humano pode fazer. "
p O novo sistema desenvolvido por Wirbel e seus colegas emprega uma rede neural artificial (RNA) que se baseia em técnicas de aprendizado profundo. A rede é alimentada com demonstrações de um ser humano operando um carro que são tiradas de uma câmera frontal e, portanto, se parecem muito com o que a pessoa estava vendo enquanto dirigia.
p A rede neural é então treinada para imitar as ações do motorista, particularmente focando em reproduzir a velocidade atual do carro. Por exemplo, quando uma imagem de entrada contém um painel de limite de velocidade de 50 km / h, a rede garante que o carro não vá a mais de 50 km / h.
p "Quando há outro carro na nossa frente, um motorista humano diminuirá a velocidade de acordo e a rede deve aprender a fazer o mesmo, "Wirbel explicou." Nossa abordagem tenta replicar como um ser humano aprende e dirige. A rede só recebe informações da câmera frontal e não precisa de percepção explícita, por exemplo, relacionadas aos semáforos ou faixas, assim como um motorista humano não tem um modelo explícito de exatamente onde as linhas estão e qual é sua forma. "
p Depois de treinar sua rede neural, Wirbel e seus colegas testaram em um ambiente de simulação e, em seguida, integraram-no dentro de um carro real, avaliando seu desempenho em uma pista de teste desafiadora. Eles descobriram que seu sistema reagia efetivamente a situações complexas, controlar a velocidade do carro quando necessário (por exemplo, desacelerar em cones de trânsito e curvas fechadas, parando em barreiras e ao se aproximar de sinais de alerta, etc.).
p "Nosso estudo prova que situações complexas, como zonas de trabalho, obstáculos inesperados, etc, pode ser tratada simplesmente observando o que um ser humano faria e, em seguida, reproduzindo-o de novo, situações semelhantes, "Wirbel disse." Isso significa que, enquanto tivermos dados de demonstração suficientes, podemos lidar com casos de uso com os quais motoristas humanos lidariam razoavelmente. Isso pode ser usado em situações de interação complexas em combinação com as abordagens mais clássicas, para tornar o veículo capaz de reagir de forma consistente e inteligente. "
p O sistema desenvolvido por Wirbel e seus colegas alcançou resultados muito promissores e poderá em breve ser aplicado a veículos autônomos, levando a um controle de velocidade mais eficaz e uma direção mais intuitiva. Os pesquisadores estão planejando estender sua prova de conceito a situações mais complexas, ensinando seu sistema a lidar com uma variedade mais ampla de interações com outros veículos na estrada, além de adicionar manobras mais complexas, como mudar de faixa, virando em cruzamentos, ou rotatórias de navegação.
p "Também gostaríamos de trabalhar na explicabilidade e compatibilidade do sistema com os veículos autônomos existentes, fornecer uma explicação ao usuário final de como a rede percebe seu ambiente e por que toma suas decisões, "Wirbel acrescentou." O roteiro de pesquisa é muito amplo, por isso estamos participando e contribuindo com as principais conferências científicas para nos mantermos atualizados com os mais recentes desenvolvimentos de ponta nesta área. Nosso papel como equipe de P&D também é fornecer ao restante da Valeo as chaves e conhecimentos corretos para trazer nossas provas de conceito para mais perto da produção. " p © 2019 Science X Network