Crédito:Petit et al.
Pesquisadores da Ecole Centrale de Lyon desenvolveram recentemente uma nova estrutura de desenvolvimento inspirada na memória de longo prazo e nos mecanismos de raciocínio dos humanos. Esta estrutura, descrito em um artigo apresentado no IEEE ICDL-Epirob em Tóquio e pré-publicado no arXiv, permite que os robôs otimizem de forma autônoma hiperparâmetros ajustados a partir de qualquer módulo de ação e / ou visão, que são tratados como uma caixa preta.
Nos últimos anos, pesquisadores construíram robôs que podem realizar uma variedade de tarefas. Apesar disso, o ambiente em que esses robôs operam costuma ser um tanto restrito. Isso ocorre porque na robótica, a maioria dos algoritmos são criados e otimizados manualmente por especialistas humanos para antecipar os desafios potenciais que o robô pode encontrar em uma determinada situação.
"Contudo, ao lidar com incertezas, por exemplo, quando o robô terá que lidar com novos objetos com frequência durante sua vida útil, sempre contar com programas adicionais e a otimização de engenheiros humanos não é viável:o robô tem que aprender por si mesmo, "Dr. Maxime Petit, um dos pesquisadores que realizou o estudo, disse TechXplore. “Queremos dotar os robôs de mecanismos de aprendizagem para que sejam autônomos e se adaptem a diversas situações, mesmo quando estes não são antecipados. "
O desenvolvimento de robôs que se adaptam automaticamente a diferentes situações pode ter uma série de aplicações úteis, por exemplo, no contexto da robótica industrial, onde braços robóticos precisam pegar objetos desconhecidos de volumes homogêneos.
Crédito:Petit et al.
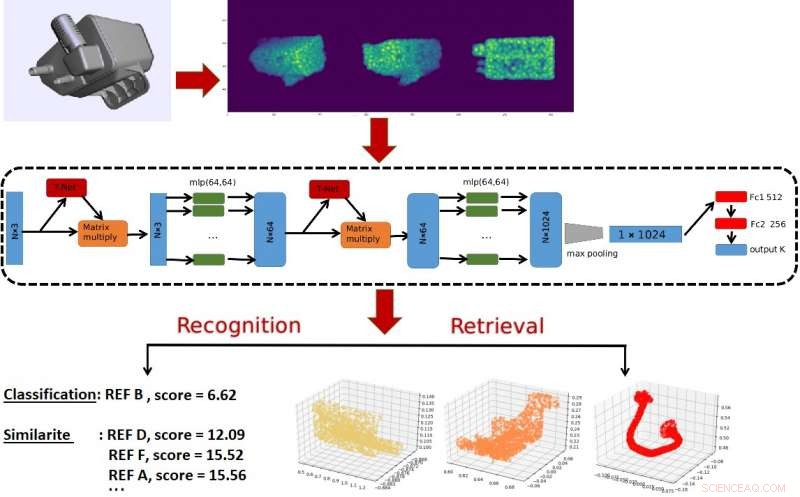
"Queríamos que o robô otimizasse de forma autônoma os parâmetros de um software de agarramento baseado em visão (Kamido da Siléane) para cada objeto em menos de algumas horas, "Petit explicou." Para fazer isso, usamos uma estrutura de desenvolvimento que visa replicar como as crianças aprendem sobre o mundo. Em particular, queremos aproveitar a semelhança entre os objetos para acelerar o processo de aprendizagem, transferindo o conhecimento de uma tarefa para outra semelhante. "
A estrutura de desenvolvimento apresentada por Petit e seus colegas visa permitir a aprendizagem permanente e aberta de novas habilidades em robôs por meio de um processo semelhante ao observado em crianças humanas. Para conseguir isso, sua estrutura inclui uma memória de longo prazo na qual os robôs armazenam suas experiências, bem como capacidades de raciocínio que lhes permitem identificar elementos úteis em seus dados armazenados.
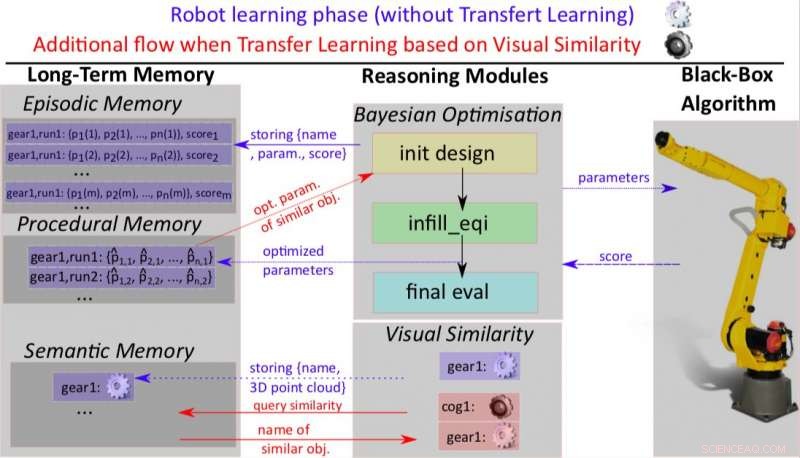
"O método de otimização Bayesiana funciona como uma estratégia inteligente de 'tentativa e erro':o robô estima qual conjunto de parâmetros é melhor avaliar com base nos resultados da avaliação anterior, "Petit explicou." Em suma, este método orienta de forma eficiente o robô na exploração de parâmetros em torno de valores que não foram experimentados, mas também para valores com alto potencial. "
Apesar da eficiência desta técnica, os pesquisadores queriam aumentar a convergência da aprendizagem do robô para obter uma melhor otimização. Métodos tradicionais de otimização Bayesiana, portanto, não eram desejáveis, como com estes, a aprendizagem do robô começa do zero para cada novo objeto que encontra. Para resolver essa limitação, os pesquisadores empregaram uma estratégia baseada na semelhança da visão.
Crédito:Petit et al.
"Queríamos aproveitar a experiência anterior do robô para tarefas diferentes, mas semelhantes, "Petit disse." Assim, quando confrontado com um novo objeto, forçamos o robô a explorar inicialmente soluções que foram otimizadas para objetos semelhantes. Por exemplo, se o robô sabe como agarrar uma laranja e agora tem que agarrar uma maçã, forçamos o robô a agarrar a maçã usando a estratégia de 'agarrar a laranja'. Estamos fazendo isso perguntando ao módulo de semelhança visual quais objetos são semelhantes aos novos, e extrair as melhores soluções para esses objetos semelhantes da memória de longo prazo. "
Os pesquisadores avaliaram sua estrutura em um ambiente de simulação. Eles descobriram que a estratégia de transferência de aprendizagem baseada na semelhança visual é muito mais benéfica do que a aprendizagem amnésica, em que os robôs aprendem estratégias do zero sempre que realizam uma nova tarefa.
Até aqui, estruturas de desenvolvimento foram investigadas principalmente no contexto da robótica social, por exemplo, ajudando a personalizar o atendimento de robôs sociais às necessidades ou preferências de seus usuários.
"O uso dessa estrutura em uma configuração de robótica industrial levou a resultados convincentes, implicando que os campos da robótica social e industrial têm muito a aprender um com o outro, "Petit disse." Outro aspecto interessante de nosso estudo é que o framework está otimizando um algoritmo de "caixa preta", o que significa que não sabemos nada sobre como está funcionando. Fornecemos parâmetros para ele, e em troca, recebemos uma pontuação por sua qualidade. Isso significa que também pode ser aplicado a diferentes aplicativos e algoritmos (mesmo fora do campo da robótica) que precisam de ajustes finos frequentes. "

Robot Kamido por Siléane
Os pesquisadores agora estão explorando maneiras pelas quais os robôs podem transferir conhecimento sobre objetos adquiridos durante simulações para tarefas reais envolvendo os mesmos objetos. Isso melhoraria ainda mais a eficiência de um robô, permitindo-lhe aprender coisas novas virtualmente e depois aplicá-las na vida real.
“A otimização de parâmetros para objetos que compartilham propriedades físicas também pode levar ao surgimento desse conceito para robôs específicos, "Petit acrescentou." Por exemplo, um robô poderia aprender que um 'apartamento, ' 'pesado, ' 'grande, 'etc. objeto deve ser compreendido com valores específicos para um subconjunto de parâmetros. Isso pode ser usado para aprimorar as interações entre humanos e robôs e o aprendizado usando a linguagem natural, por exemplo, com trabalhadores ajudando o robô, fornecendo uma pequena descrição dos novos objetos a serem manuseados. "
© 2018 Tech Xplore