Novas ferramentas de localização e mapeamento em tempo real para robótica, VR, e AR
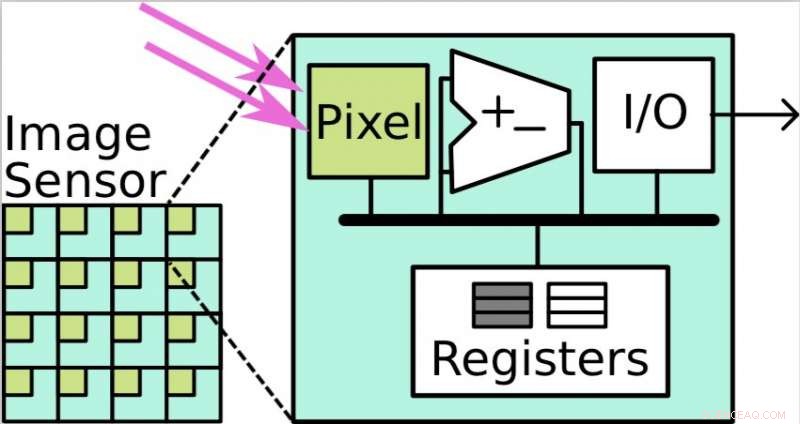 p Matrizes de processador de sensor de plano focal (FPSPs) são sistemas de processamento paralelo, onde cada pixel possui um elemento de processamento. Crédito:Saeedi et al.
p Matrizes de processador de sensor de plano focal (FPSPs) são sistemas de processamento paralelo, onde cada pixel possui um elemento de processamento. Crédito:Saeedi et al.
p Um grande grupo de pesquisadores do Imperial College London, a Universidade de Edimburgo, a Universidade de Manchester, e a Universidade de Stanford recentemente colaboraram em um projeto que explora a aplicação de localização em tempo real e ferramentas de mapeamento para robótica, veículos autônomos, realidade virtual (VR) e realidade aumentada (AR). Seu papel, publicado no arXiv e
Processos do IEEE , descreve o desenvolvimento de métodos para avaliar algoritmos de localização e mapeamento simultâneos (SLAM), bem como uma série de outras ferramentas interessantes. p “O objetivo do nosso trabalho foi trazer pesquisadores especialistas em visão computacional, comunidades de hardware e compiladores juntas para construir sistemas futuros para robótica, VR / AR, e a Internet das Coisas (IoT), "os pesquisadores disseram à Tech Xplore em um e-mail." Queríamos construir sistemas de visão computacional robustos que fossem capazes de perceber o mundo com um orçamento de energia muito baixo, mas com a precisão desejada; estamos interessados na percepção por métrica Joule. "
p Os pesquisadores envolvidos no projeto combinaram suas habilidades e conhecimentos para montar algoritmos, arquiteturas, Ferramentas, e software necessário para entregar SLAM. Suas descobertas podem ajudar aqueles que aplicam SLAM em uma variedade de campos para selecionar e configurar algoritmos e hardware que podem atingir níveis ideais de desempenho, precisão, e consumo de energia.
p “Um ponto importante do projeto é a ideia da pesquisa interdisciplinar:reunir especialistas de diferentes áreas pode possibilitar descobertas que não seriam possíveis de outra forma, "disseram os pesquisadores.
p Os algoritmos SLAM são métodos que podem construir ou atualizar um mapa de um ambiente desconhecido enquanto mantém o controle da localização de um determinado agente dentro dele. Esta tecnologia pode ter aplicações úteis em vários campos, por exemplo, no desenvolvimento de veículos autônomos, robótica, VR, e AR.
p Em seu estudo, os pesquisadores desenvolveram e avaliaram várias ferramentas, incluindo compilador e sistemas de software runtime, bem como arquiteturas de hardware e algoritmos de visão computacional para SLAM. Por exemplo, eles desenvolveram ferramentas de benchmarking que lhes permitiram selecionar um conjunto de dados adequado e usá-lo para avaliar algoritmos SLAM.
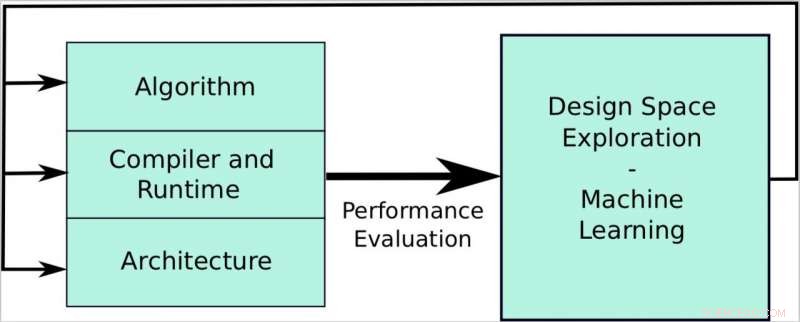 p O objetivo do artigo é criar um pipeline que alinhe os requisitos de visão computacional com recursos de hardware. O foco do artigo está em três camadas:algoritmos, compilador e tempo de execução, e arquitetura. O objetivo é desenvolver um sistema que nos permita alcançar eficiência energética e energética, melhoria de velocidade e tempo de execução, e precisão / robustez em cada camada e também holisticamente por meio de técnicas de exploração de espaço de design e aprendizado de máquina. Crédito:Saeedi et al.
p O objetivo do artigo é criar um pipeline que alinhe os requisitos de visão computacional com recursos de hardware. O foco do artigo está em três camadas:algoritmos, compilador e tempo de execução, e arquitetura. O objetivo é desenvolver um sistema que nos permita alcançar eficiência energética e energética, melhoria de velocidade e tempo de execução, e precisão / robustez em cada camada e também holisticamente por meio de técnicas de exploração de espaço de design e aprendizado de máquina. Crédito:Saeedi et al.
p Por exemplo, eles usaram um aplicativo chamado SLAMBench para avaliar o algoritmo KinectFusion em várias plataformas de hardware e SLAMBench2 para comparar diferentes algoritmos SLAM. Os pesquisadores também ampliaram o algoritmo KinectFusion, para que possa ser usado no planejamento de caminhos robóticos e algoritmos de navegação; mapeamento de espaços ocupados e livres no ambiente.
p "Este projeto foi muito amplo, portanto, as descobertas foram bastante numerosas, "disseram os pesquisadores." Por exemplo, mostramos aplicações práticas onde a computação aproximada pode desempenhar um papel importante na obtenção da percepção por Joule, por exemplo, o aplicativo SLAMBench desenvolvido para smartphones. A computação aproximada é a ideia de completar uma tarefa de computação com um dado erro aceitável, e assim produzir uma solução aproximada. "
p O projeto explorou o uso de novas tecnologias de detecção, como matrizes de processador de sensor de plano focal, que apresentaram baixo consumo de energia e altas taxas de quadros. Além disso, investigou a aplicação de estática, dinâmico, e abordagens de agendamento de programa híbrido em sistemas multicore, particularmente para o algoritmo KinectFusion.
p "Nossa pesquisa já está causando impacto em muitos campos, como robótica, VR / AR, e IoT, onde as máquinas estão sempre ligadas e são capazes de se comunicar e realizar suas tarefas com precisão razoável, sem interrupções, com muito pouco consumo de energia, "disseram os pesquisadores.
p Este projeto abrangente levou a várias descobertas importantes, e para o desenvolvimento de novas ferramentas que poderiam facilitar em grande parte a implementação de SLAM em robótica, VR, AR, e veículos autônomos.
p O estudo também fez uma série de contribuições no contexto do design de hardware, por exemplo, desenvolver ferramentas de perfil para localizar e avaliar gargalos de desempenho em aplicativos nativos e gerenciados. Os pesquisadores apresentaram um fluxo de trabalho completo para a criação de hardware para aplicativos de visão computacional, que pode ser aplicado a plataformas futuras.
p "Agora usaremos nossas descobertas para construir um sistema integrado para robótica e VR / AR, "disseram os pesquisadores." Por exemplo, Dr. Luigi Nardi da Universidade de Stanford está continuando sua pesquisa aplicando conceitos semelhantes a Redes Neurais Profundas (DNN), ou seja, otimizar hardware e software para executar DNN de forma eficiente, enquanto o Dr. Sajad Saeedi, do Imperial College London, está procurando tecnologias analógicas alternativas, como matrizes de processador de sensores de plano focal (FPSPs), que permitem que o DNN seja executado em taxas de quadros muito altas, ordem de 1000s FPS, para dispositivos sempre ligados e carros autônomos. " p © 2018 Tech Xplore