Plantas carnívoras inspiram superfícies escorregadias inteligentes e robôs biônicos
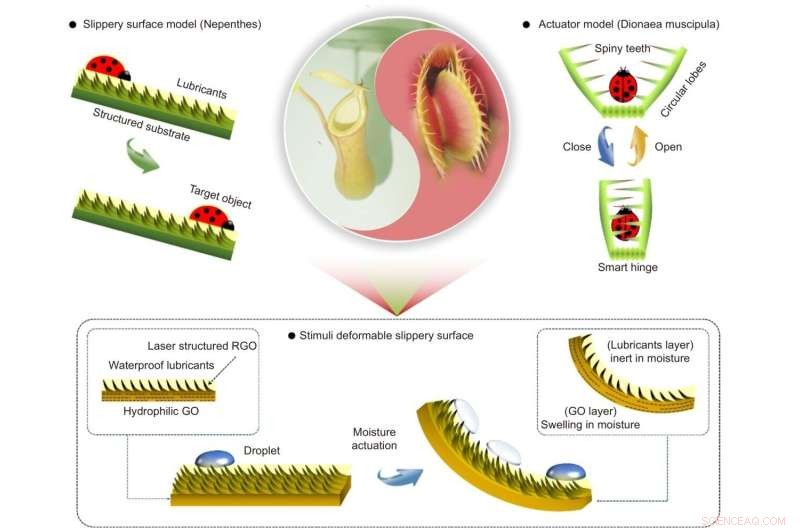
Conceito básico de superfície escorregadia de forma responsiva à umidade híbrida inspirada em plantas carnívoras multiformes. A planta de jarro Nepenthes captura insetos passivamente com a ajuda de uma superfície escorregadia infundida com lubrificante. A Dionaea muscipula preda ativamente por meio de um mecanismo de atuação responsivo a estímulos. Combinamos as superfícies escorregadias (presas passivas) e a atuação responsiva a estímulos (presas ativas), então propusemos um GO híbrido biônico deformável por umidade com base em superfícies escorregadias, que permite a manipulação ativa e passiva de gotículas. GO:óxido de grafeno; RGO, GO reduzido. Crédito:Compuscript Ltda.
Uma nova publicação da
Avanços Opto-Eletrônicos discute como as plantas carnívoras inspiram superfícies escorregadias inteligentes e robôs biônicos.
As plantas carnívoras inspiraram inovações de atuadores avançados responsivos a estímulos e superfícies escorregadias com infusão de lubrificante. No entanto, o desenvolvimento de dispositivos biônicos híbridos que combinam as capacidades de captura de presas ativas e passivas das plantas carnívoras continua sendo um desafio. A equipe de pesquisa desenvolveu uma superfície escorregadia de transformação de forma responsiva à umidade. Eles integraram uma superfície escorregadia com infusão de lubrificante com um atuador de bicamada LRGO/GO. A equipe preparou uma série de atuadores de prova de conceito, incluindo uma língua de sapo inteligente e uma flor inteligente, demonstrando captura ativa/passiva, manipulação de gotículas e detecção.
As plantas carnívoras podem capturar e digerir pequenos insetos por meio de mecanismos de atuação sofisticados ou molhabilidade de superfície única. Essa capacidade inspirou o desenvolvimento de superfícies/dispositivos inteligentes artificiais para aplicações de engenharia, como superfícies antigelo, anti-bioincrustação, condensação de gotículas e manipulação de gotículas. A imitação de seus comportamentos de captura levou a estratégias inovadoras para projetar superfícies sintéticas, atuadores e robôs.
Geralmente, o mecanismo de captura de plantas carnívoras difere entre as diferentes espécies, que podem ser classificadas em duas categorias:captura ativa e captura passiva. No entanto, dispositivos biônicos híbridos que combinam os méritos dos dois tipos distintos de plantas carnívoras, com habilidades de captura positiva e passiva, ainda são raros. A combinação de atuadores inspirados em Dionaea muscipula com uma superfície escorregadia que imita a planta de jarro Nepenthes é benéfica tanto para o projeto do atuador quanto para o desenvolvimento de uma superfície inteligente com super molhabilidade. No entanto, é um desafio chegar a esse fim.
A escrita direta a laser de femtosegundo (FsLDW) induziu a fotorredução e a estruturação simultânea para preparar um atuador de bicamada GO e LRGO que permite a deformação dinâmica sob a atuação da umidade. After that, a lubricant-infused slippery surface was integrated with the graphene actuator by immobilizing lubricant at the LRGO side through the capillary forces.
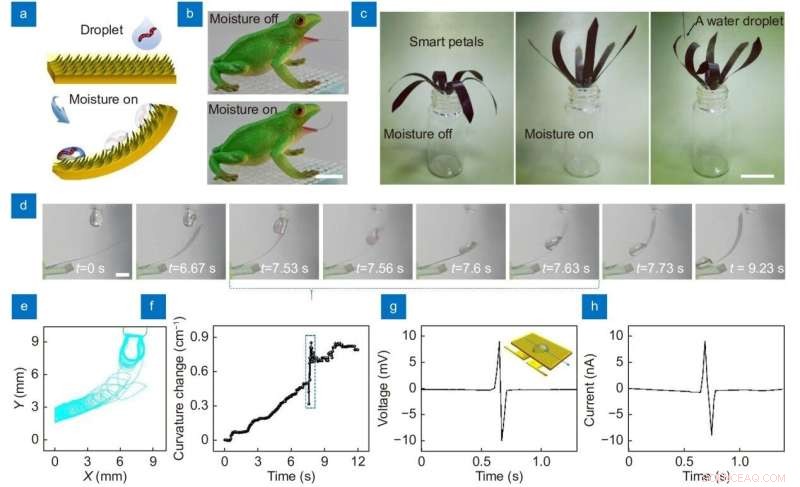
The manipulation of droplets on moisture responsive shape-morphing slippery surface. (a) Schematic illustration for the active and passive manipulation of a droplet containing live tubificidaes using the shape-morphing slippery surface. (b) The photographs of shape-morphing slippery frog tongue. The scale bar is 1.5 cm. (c) A smart water droplet harvesting flower. Every flower petal is made of the shape-morphing slippery surface (oil-LRGO/GO). The scale bar is 1.5 cm. (d) Moisture triggered active approach to water droplets containing live tubificidaes and the passive sliding behavior on the shape-morphing slippery surface. The scale bar is 0.5 cm. (e) The corresponding trajectory of the water droplet peripheries during the dynamic process. (f) The curvature changes of the shape-morphing slippery surface in (d). (g) The open-circuit voltage and (h) short-circuit current. Credit:Compuscript Ltd
The two types of carnivorous plants demonstrate distinct strategies for trapping prey. Nepenthes pitcher plants catch insects through a passive trapping mechanism with the help of lubricants-infused slippery surfaces. In contrast, Dionaea muscipula performs an active trapping behavior through a sophisticated actuating mechanism. The concept of the hybrid bionic model is the combination of the two tapping behaviors within one synthetic smart surface here, which the research team called a stimuli deformable slippery surface.
Traditional stimuli-responsive actuators enable reversible deformation under external stimuli. They reveal the great potential for developing trapping robots. However, in most cases, simple bending deformation cannot trap insects because of the slow response to environmental stimuli or the lack of surface wettability control. The team combined the moisture-responsive actuator with a lubricant-infused slippery surface together. The combined effect of actuation and slippery property endows the oil-infused LRGO/GO film with enhanced trapping ability.
The research team demonstrated a moisture-responsive shape-morphing slippery surface that can contact droplets actively and let them slide away passively. Based on this hybrid bionic concept, a smart frog tongue that can catch and manipulate droplets containing live tubificidaes is prepared. Notably, the slippery surface can bend under moisture actuation, get in touch with the droplet, and let it slide to the bottom, demonstrating both active catching and passive trapping capabilities.
In conclusion, the in-situ integration of the lubricant-infused slippery surface with the bilayer actuator does not degrade the actuating performance. It also improves its deformation degrees under moisture actuation. The presence of an oil layer can entirely prevent the transmission of water molecules through the LRGO side, and selective water adsorption only occurs within the GO layer. As a result, the oil-LRGO/GO actuator demonstrated large deformation curvature, short response/recovery time, and improved stability. For practical applications, laser interference ablation that uses an interference effect for periodical patterning is more effective. The significance of this work lies in the fabrication of a shape-morphing slippery surface with hybrid bionic functionalities of both stimuli-responsive deformation and oil-lubricated slippery properties.
The combination of shape-morphing ability with the slippery surface benefits both actuating performance and the usefulness of a smart surface with super wettability. It leads to new applications, such as droplet collection, manipulation, and rainfall sensing. Moisture-responsive actuators can directly harness energy from naturally occurring or engineered evaporation from water. That can subsequently be converted to mechanical energy or electricity, such as weather-responsive architectural systems, smart textiles, and soft robots. The cross-species bio-inspired materials benefit both actuator design and the development of smart surfaces with super wettability. The moisture-responsive shape-morphing slippery surface reveals great potential for developing bionic robots.
+ Explorar mais Liquid-infused slippery surface performs better than superhydrophobic surface in long-term corrosion resistance