O rover LEAP é baseado no robô de pernas, ANYmal, desenvolvido na ETH Zürich e seu spin-off ANYbotics. Crédito:ETH Zürich/RSL Robotics Labs
Um robô de quatro patas treinado por meio de inteligência artificial aprendeu a mesma lição que os astronautas da Apollo – que pular pode ser a melhor maneira de se movimentar na superfície da lua. Uma atualização do LEAP (Legged Exploration of the Aristarchus Plateau), um estudo de conceito de missão apoiado pela ESA para explorar alguns dos terrenos lunares mais desafiadores, foi apresentado hoje no Europlanet Science Congress (EPSC) 2022 em Granada por Patrick Bambach.
"O alvo do LEAP é o planalto de Aristarco, uma região da lua que é particularmente rica em características geológicas, mas altamente difícil de acessar", disse Patrick Bambach, do Instituto Max Planck para Pesquisa do Sistema Solar, na Alemanha. "Com o robô, podemos investigar as principais características para estudar a história geológica e a evolução da lua, como o material ejetado em torno de crateras, locais de impacto recentes e tubos de lava colapsados, onde o material pode não ter sido alterado pelo intemperismo espacial e outros processos. "
A equipe do LEAP está trabalhando para que o robô seja integrado ao European Large Logistic Lander (EL3) da ESA, que está programado para pousar na Lua várias vezes do final dos anos 2020 ao início dos anos 2030. LEAP é baseado no robô de pernas, ANYmal, desenvolvido na ETH Zürich e seu spin-off ANYbotics. Atualmente, está adaptado ao ambiente lunar por um consórcio da ETH Zurich, do Instituto Max Planck para Pesquisa do Sistema Solar, OHB, da Universidade de Münster e da Universidade Aberta.

Diferentes versões do robô de pernas, ANYmal, desenvolvido na ETH Zürich e seu spin-off ANYbotics. Crédito:ETH Zürich/RSL Robotics Labs
"Rovers tradicionais permitiram grandes descobertas na Lua e em Marte, mas têm limitações", disse Bambach. "Explorar terrenos com solo solto, pedras grandes ou declives acima de 15 graus é particularmente desafiador com rodas. Por exemplo, o rover de Marte, Spirit, teve sua missão encerrada quando ficou preso na areia."
ANYmal pode se mover em diferentes marchas, permitindo cobrir grandes distâncias em um curto período de tempo, escalar encostas íngremes, implantar instrumentos científicos e até se recuperar no improvável caso de uma queda. O robô também pode usar suas pernas para cavar canais no solo, virar pedregulhos ou pedras menores para inspeção adicional e coletar amostras.
Inicialmente, o robô foi treinado usando uma abordagem de Aprendizado por Reforço em um ambiente virtual para simular as propriedades do terreno lunar, gravidade e poeira. Também foi implantado no campo para uma caminhada ao ar livre.
-
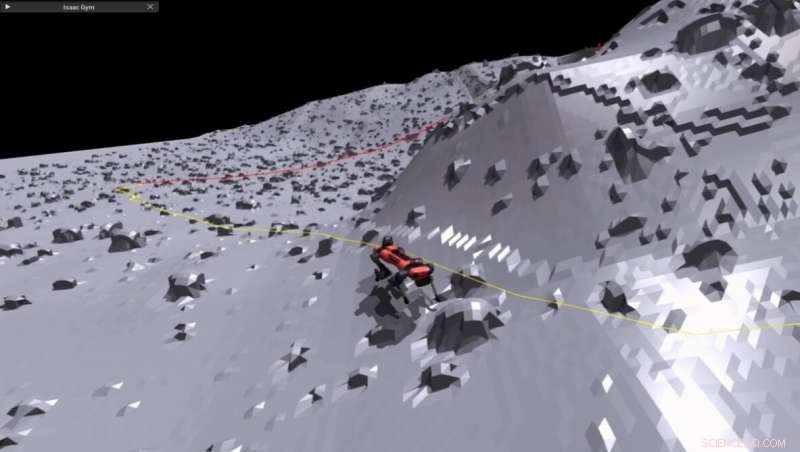
O rover LEAP é treinado usando uma abordagem de Aprendizado por Reforço em um ambiente virtual para simular o terreno lunar, a gravidade e as propriedades da poeira. Crédito:ETH Zürich/RSL Robotics Labs
-

LEAP (Legged Exploration of the Aristarchus Plateau) é um estudo de conceito de missão financiado pela ESA para explorar alguns dos terrenos lunares mais desafiadores. Crédito:ETH Zürich/RSL Robotics Labs
-
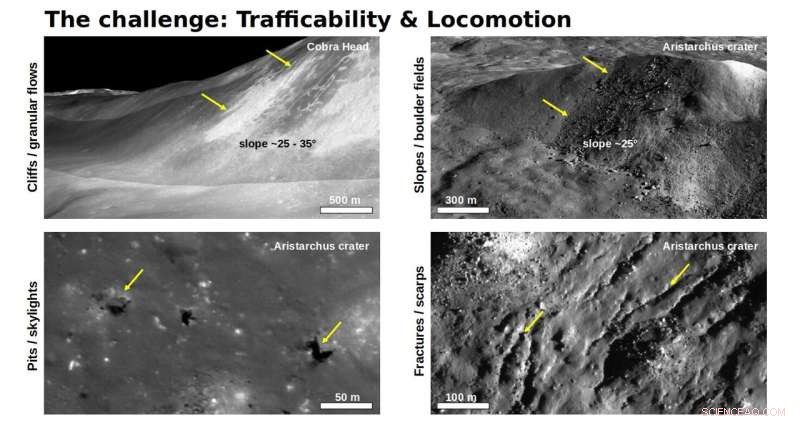
O alvo do LEAP é o planalto de Aristarco, uma região da Lua que é particularmente rica em características geológicas, mas altamente difícil de acessar. Crédito:NASA/ESA
“Curiosamente, o ANYmal começou a usar um modo de locomoção semelhante ao salto, assim como os astronautas da Apollo – percebendo que pular pode ser mais eficiente em termos energéticos do que caminhar”, disse Bambach.
O projeto atual permanece abaixo de 100 kg e inclui 10 kg de massa de carga útil científica, sendo capaz de transportar sensores multiespectrais, radar de penetração no solo, espectrômetros de massa, gravímetros e outros instrumentos.
“A capacidade do LEAP de coletar amostras selecionadas e trazê-las para um veículo de aterrissagem ou ascensão oferece oportunidades adicionais empolgantes para amostras de missões de retorno em ambientes altamente desafiadores na Lua ou em Marte”, disse Bambach.
+ Explorar mais Usando rodas em forma de C, este rover pode escalar terrenos lunares mais desafiadores