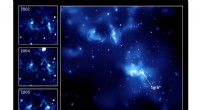
Um mapa de caminhada virtual para a cratera Jezero, o local de pouso do rover Mars 2020 Perseverance
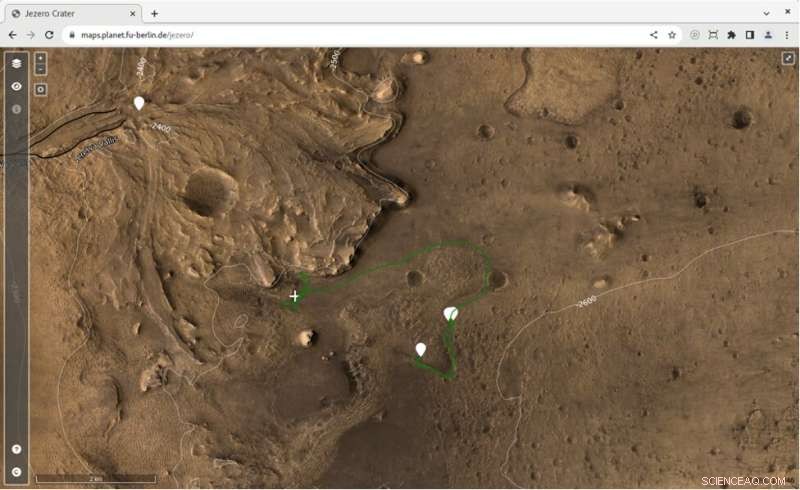
Visualização de mapa com conjunto de dados base, pontos de vista clicáveis são marcados como gotas. Crédito:HiRISE/CTX/HRSC
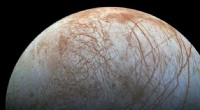
Os futuros exploradores de Marte agora podem fazer uma caminhada ao redor do local de pouso do rover Mars 2020 Perseverance da NASA com um mapa interativo carregado com imagens orbitais, dados do terreno, bem como vistas panorâmicas 3D sintéticas e reais da cratera Jezero e seus arredores. O mapa, que pode ser acessado através de um navegador normal, foi apresentado hoje no Europlanet Science Congress (EPSC) 2022 em Granada, Espanha, por Sebastian Walter da Freie Universität Berlin.
"O mapa é a ferramenta perfeita para planejar uma futura visita a Marte, com uma interface interativa onde você pode escolher entre diferentes conjuntos de dados de base disponíveis. Algumas das encostas são bastante íngremes, então tome cuidado com elas se você quiser evitar muito oxigênio consumo!" disse Sebastião Walter.
"Para ter uma ideia real do que esperar em sua futura viagem a Marte, você pode clicar em um dos símbolos do marcador de waypoint para entrar em uma visualização 3D em tela cheia ou, se tiver uma configuração de Realidade Virtual, para entrar em um ambiente totalmente imersivo. Você pode até ouvir os sons do rover se estiver por perto, mas, por favor, não toque nele - caso contrário, você contaminaria as sondas."
O mapa permite que os caminhantes virtuais ampliem e diminuam o zoom e se movimentem rapidamente pelas cenas, para que possam explorar a paisagem de grandes escalas até detalhes de centímetros. Alguns dos panoramas de 360° integrados aos waypoints foram renderizados sinteticamente a partir de dados de imagens orbitais.
-
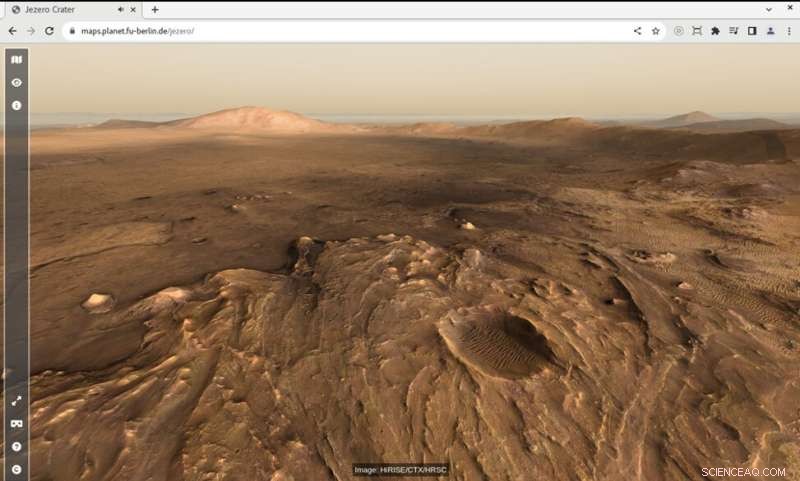
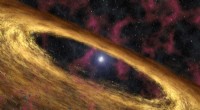
Vista virtual do topo do delta ocidental para a cratera. Crédito:HiRISE/CTX/HRSC
-
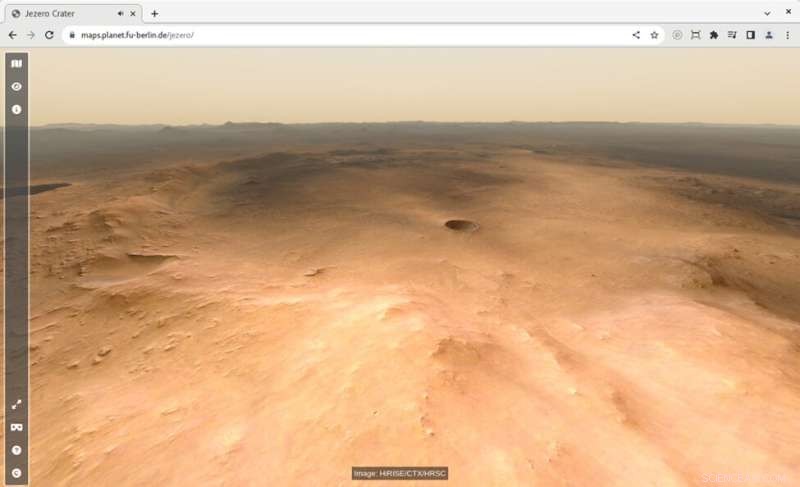
Vista virtual do topo de Jezero Mons para a cratera. Crédito:HiRISE/CTX/HRSC
Outros são panoramas reais costurados a partir de uma infinidade de imagens únicas tiradas pelo instrumento da câmera Mastcam-Z a bordo do Mars 2020 Rover Perseverance, que foram fornecidas pela Universidade do Arizona. Os sons foram gravados pelo instrumento SuperCam nessa mesma missão do rover.
A camada base do mapa é um conjunto de dados mesclado derivado de três instrumentos diferentes atualmente orbitando Marte:o HRSC no Mars Express e os instrumentos Context Camera (CTX) e High Resolution Imaging Science Experiment (HiRISE) no Mars Reconnaissance Orbiter (MRO). Os dados HiRISE foram fornecidos pela equipe Terrain Relative Navigation (TRN) do Jet Propulsion Laboratory (JPL).
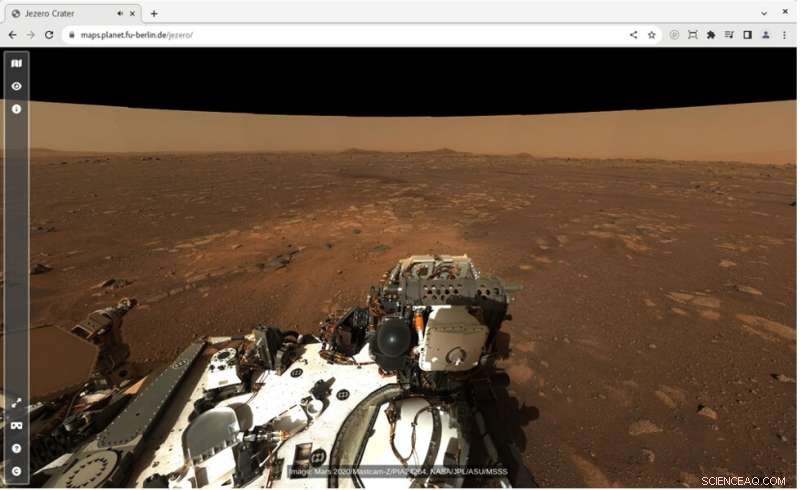
Mosaico panorâmico MastcamZ do local de desembarque de Octavia E. Butler. Crédito:Mars 2020/Mastcam-Z/PIA24264, NASA/JPL/ASU/MSSS
O mapa Jezero baseia-se no portal de dados do instrumento High Resolution Stereo Camera (HRSC) da missão Mars Express da ESA, que fornece ferramentas para visualizar e divulgar grandes quantidades de imagens de Marte e dados de terreno num ambiente online.
"Inicialmente, criamos o mapa Jezero como um aplicativo de divulgação para complementar a ferramenta HRSC Mapserver, que oferece suporte a cientistas profissionais para explorar a superfície marciana", disse Sebastian Walter. “Mas, à medida que o rover retorna cada vez mais dados de imagem de alta resolução e até gravações de áudio, ele se torna a ferramenta perfeita para visualização imersiva desses dados em um contexto científico por si só”.
+ Explorar mais Belas dunas em Marte, esculpidas por ventos rodopiantes