Pesquisadores desenvolvem fluxo de processo para impressão 3-D de alta resolução de atuadores robóticos mini soft
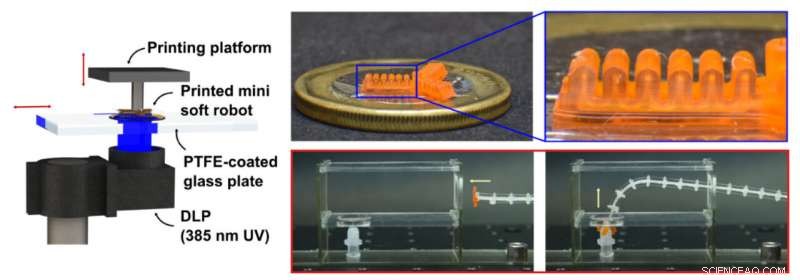 p Um fluxo de processo genérico é proposto para guiar a impressão 3D de atuadores pneumáticos macios em miniatura menores que uma moeda. Um removedor de detritos macio com uma garra miniatura integrada pode realizar a navegação em um espaço confinado e a coleção de pequenos objetos em posições de difícil alcance. Crédito:SUTD
p Um fluxo de processo genérico é proposto para guiar a impressão 3D de atuadores pneumáticos macios em miniatura menores que uma moeda. Um removedor de detritos macio com uma garra miniatura integrada pode realizar a navegação em um espaço confinado e a coleção de pequenos objetos em posições de difícil alcance. Crédito:SUTD
p Robôs macios são uma classe de sistemas robóticos feitos de materiais compatíveis e capazes de se adaptar com segurança a ambientes complexos. Eles viram um rápido crescimento recentemente e vêm em uma variedade de designs abrangendo várias escalas de comprimento, de metros a submicrômetros. p Em particular, Pequenos robôs macios em escala milimétrica são de interesse prático, pois podem ser projetados como uma combinação de atuadores em miniatura simplesmente acionados por pressão pneumática. Eles também são adequados para navegação em áreas confinadas e manipulação de pequenos objetos.
p Contudo, reduzir a escala dos robôs pneumáticos macios para milímetros resulta em recursos mais precisos que são reduzidos em mais de uma ordem de magnitude. A complexidade do projeto de tais robôs exige grande delicadeza quando são fabricados com processos tradicionais, como moldagem e litografia suave. Embora as tecnologias emergentes de impressão 3-D, como o processamento digital de luz (DLP), ofereçam altas resoluções teóricas, lidar com vazios e canais em microescala sem causar entupimento ainda é um desafio. De fato, exemplos bem-sucedidos de robôs pneumáticos macios em miniatura com impressão 3D são raros.
p Recentemente, pesquisadores de Cingapura e China, nomeadamente da Universidade de Tecnologia e Design de Singapura (SUTD), Universidade de Ciência e Tecnologia do Sul (SUSTech) e Universidade de Zhejiang (ZJU), propôs um fluxo de processo genérico para guiar a impressão DLP 3-D de atuadores pneumáticos em miniatura para robôs soft com tamanho total de 2-15 mm e tamanho de recurso de 150-350 μm (consulte a imagem). Sua pesquisa foi publicada em
Tecnologias de Materiais Avançadas .
p "Aproveitamos a alta eficiência e resolução da impressão DLP 3-D para fabricar atuadores robóticos macios em miniatura, "disse o Professor Associado Qi (Kevin) Ge da SUSTech, pesquisador principal do projeto de pesquisa. "Para garantir fidelidade de impressão confiável e desempenho mecânico nos produtos impressos, introduzimos um novo paradigma para uma adaptação sistemática e eficiente da formulação do material e dos principais parâmetros de processamento. "
p Na impressão DLP 3-D, fotoabsorventes são comumente adicionados em soluções de polímero para melhorar as resoluções de impressão nas direções lateral e vertical. Enquanto isso, o aumento excessivo da dose leva à rápida degradação da elasticidade do material, o que é crucial para que robôs macios suportem grandes deformações.
p "Para alcançar uma compensação razoável, primeiro selecionamos um fotoabsorvente com boa absorvância no comprimento de onda da luz ultravioleta projetada e determinamos a formulação de material apropriada com base em testes de desempenho mecânico. Próximo, caracterizamos a profundidade de cura e a fidelidade XY para identificar a combinação adequada de tempo de exposição e espessura da camada fatiada, "explicou o co-primeiro autor Yuan-Fang Zhang do SUTD.
p "Seguindo este fluxo de processo, somos capazes de produzir uma variedade de atuadores robóticos pneumáticos macios em miniatura com várias estruturas e modos de transformação, todos menores do que uma moeda de um dólar de Cingapura, em um sistema de impressão 3-D multimaterial de construção própria. A mesma metodologia deve ser compatível com estereolitografia comercial (SLA) ou impressoras DLP 3-D, pois nenhuma modificação de hardware é necessária, "disse o autor correspondente, Professor Qi Ge da SUSTech.
p Para exemplificar as aplicações potenciais, os pesquisadores também desenvolveram um removedor de detritos macios compreendendo um manipulador contínuo e uma garra pneumática macia em miniatura impressa em 3-D. Ele pode navegar por um espaço confinado e coletar pequenos objetos em posições de difícil alcance.
p A abordagem proposta abre caminho para a impressão em 3D de robôs macios em miniatura com geometrias complexas e designs multimateriais sofisticados. Essa integração de atuadores pneumáticos macios em miniatura impressos em um sistema robótico oferece oportunidades para aplicações potenciais, como manutenção de motores a jato e cirurgia minimamente invasiva.