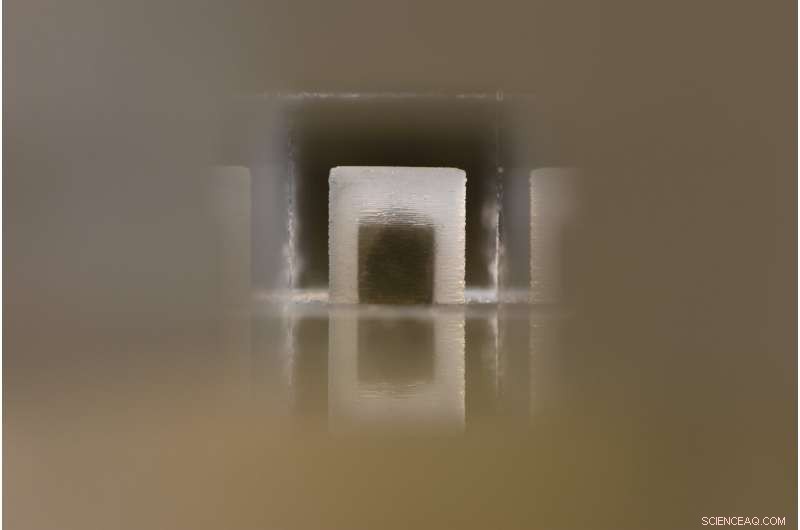
A cúpula (área clara) dentro do canal de acrílico usado para o teste experimental. Dentro da cúpula estão placas de gálio-índio de metal líquido (área escura). Crédito:Laboratório de Pesquisa Naval dos EUA.
A natureza pode ser uma fonte preciosa de inspiração para pesquisadores que desenvolvem robôs e sistemas de inteligência artificial (IA). Estudos em robótica submersível, por exemplo, muitas vezes tentaram replicar ou incorporar mecanismos observados na vida aquática, como padrões de locomoção de peixes e texturas de pele de tubarão.
Uma equipe de pesquisadores do Laboratório de Pesquisa Naval dos EUA e do Centro de Guerra Submarina Naval dos EUA desenvolveram recentemente uma cúpula sensitiva de fluxo capacitiva inspirada em neuromastos superficiais, que são essencialmente estruturas no corpo de peixes e anfíbios que podem detectar o fluxo de água. Esta cúpula, apresentado em um artigo publicado no MDPI, exibe uma alta sensibilidade de 0,05 picofarad por milímetro (pF / mm) e pode ser aplicado a uma variedade de robôs e veículos projetados para serem implantados debaixo d'água.
"The U.S. Naval Research Laboratory, junto com muitas outras instituições, está explorando meios inspirados na natureza para alcançar maior eficiência e capacidade de manobra em robôs subaquáticos, "Charles Rohde, um dos pesquisadores que realizou o estudo, disse TechXplore. "Em essência, a criação de um peixe artificial oferece muitos benefícios em relação aos designs tradicionais com hélice. Se olharmos para as contrapartes biológicas, no entanto, vemos que seu sucesso se deve a mais do que apenas a mecânica e o movimento corporal; peixes têm conjuntos de sensores ao longo de seus corpos. "
Os peixes têm uma série de sensores chamados de linha lateral que fornecem feedback da condição do fluxo, permitindo que eles se orientem debaixo d'água e detectem objetos próximos. Rohde e seus colegas queriam replicar esses sensores e imitar suas propriedades para aprimorar o desempenho dos veículos subaquáticos.
As cúpulas biológicas observadas em peixes são compostas de gel embebido com pêlos sensores, que estão ligados ao cérebro do animal aquático por meio de uma série de nervos. A cúpula artificial desenvolvida pelos pesquisadores, por outro lado, é feito de borracha de silicone embutida com placas de detecção de metal líquido, que são conectados a um microcontrolador por meio de fios.
Outra diferença entre as cúpulas naturais e a artificial desenvolvida pelos pesquisadores é que, embora a primeira empregue sinais eletroquímicos, o último é capacitivo (ou seja, como telas sensíveis ao toque de smartphones, depende de mudanças nos campos elétricos). Em contraste com telas sensíveis ao toque, o dispositivo bioinspirado não interage com objetos externos (por exemplo, dedos humanos). Em vez de, consiste em placas de metal líquido movendo-se e deformando-se umas em relação às outras.
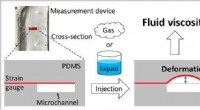
"As placas de metal líquido (gálio-índio) formam dois sensores capacitivos que se deformam com base nas forças transmitidas à cúpula de silicone pelo fluxo do fluido, "James Wissman, outros pesquisadores envolvidos no estudo, explicado. "À medida que a cúpula se deforma, as placas de metal líquido dentro se movem para mais perto ou mais longe uma da outra, mudando a capacitância entre eles. Um microcontrolador registra essa mudança na capacitância, que pode ser relacionado à taxa de fluxo de fluido externo por meio de experimentação e modelagem matemática. "
Os sensores capacitivos desenvolvidos pelos pesquisadores têm alta sensibilidade e também podem ser dispostos em arranjos. Por exemplo, dezenas desses sensores podem ser dispostos em um robô subaquático em uma linha lateral, a fim de capturar e rastrear as características do fluxo de água. Essas cúpulas sensoriais são suaves; assim, eles podem ser integrados com materiais de pele artificial sem adicionar rigidez às máquinas bioinspiradas.

Amostra de cúpula mostrando sua flexibilidade. Crédito:Laboratório de Pesquisa Naval dos EUA.
"Existem vários outros sensores de fluxo baseados em cúpula e cabelo publicados na literatura, mas ficamos surpresos ao encontrar apenas um outro subaquático, exemplo inspirado em bigode de selo que era de natureza capacitiva, "Disse Rohde." Nossos resultados mostram que o sensoriamento capacitivo é uma abordagem muito promissora, e esperamos que nossa publicação incentive outras pessoas a explorar esse método. "
Rohde, Wissman e seus colegas fabricaram seu sensor bioinspirado usando cera perdida e técnicas de injeção a vácuo. Em seguida, realizaram uma série de testes preliminares para avaliar seu desempenho.
Comparado a outros dispositivos capacitivos, seu sensor incorpora transdutores na própria cúpula, ao invés de em sua base. Em suas avaliações, este aspecto particular da fabricação do sensor provou ser muito eficaz, levando a capacidades de detecção mais avançadas do que aquelas observadas em dispositivos capacitivos desenvolvidos anteriormente.
"Além do próprio sensor, outro aspecto importante é o processo de fabricação, "Wissman disse." Para criar uma estrutura tão complexa dentro de uma pequena estrutura de silicone, usamos uma combinação única de moldagem sacrificial (pense em fundição por cera perdida) e injeção a vácuo de metal líquido. Isso poderia ser facilmente estendido a outros dispositivos, como fiação 3D complexa ou antenas. "
O dispositivo de detecção desenvolvido pela Rohde, Wissman e seus colegas podem ter uma ampla variedade de aplicações no campo da robótica submersível, pois permite o desenvolvimento de robôs que podem navegar em ambientes subaquáticos de forma mais eficaz. Em seu trabalho futuro, os pesquisadores planejam miniaturizar seu dispositivo, que atualmente tem 5 mm de altura; 50 vezes maior do que os neuromastos observados em peixes.
Uma versão menor do sensor pode permitir uma medição mais direta das condições de fluxo da camada limite, ainda mais perto da superfície do robô voltada para a água. Para miniaturizar o sensor, Contudo, os pesquisadores precisarão mudar seus métodos de fabricação.
Até aqui, Wissman e seus colegas se concentraram principalmente em fluxos de água constantes (ou que mudam lentamente), mas variações de fluxo super-rápidas (ou seja,> 1, 000-10, 000 vezes por segundo) associadas à turbulência e vórtices podem fornecer uma visão mais profunda sobre o ambiente ao redor de um robô. Em seus próximos estudos, os pesquisadores gostariam, portanto, de ampliar o escopo de seu trabalho, incluindo essas variações de fluxo e observando técnicas de aquisição de dados mais rápidas.
"Também planejamos montar uma série de cúpulas artificiais - uma linha lateral artificial - que podem ser acopladas a um robô submersível, "Wissman disse." O ponto culminante deste projeto seria assistir a um peixe robótico autônomo, com a ajuda de nossos sensores embutidos, navegar com sucesso em uma piscina com obstáculos e correntes. "
© 2019 Science X Network