Crédito:MIT
Anos atrás, O professor Neil Gershenfeld do MIT teve um pensamento audacioso. Impressionado com o fato de que todas as coisas vivas do mundo são feitas de combinações de apenas 20 aminoácidos, ele se perguntou:será possível criar um kit de apenas 20 peças fundamentais que possa ser usado para montar todos os diferentes produtos tecnológicos do mundo?
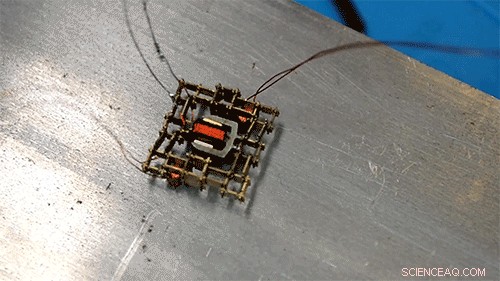
Gershenfeld e seus alunos têm feito progressos constantes nessa direção desde então. Sua última conquista, apresentado esta semana em uma conferência internacional de robótica, consiste em um conjunto de cinco pequenas peças fundamentais que podem ser montadas em uma ampla variedade de dispositivos funcionais, incluindo um minúsculo motor "ambulante" que pode se mover para frente e para trás em uma superfície ou girar as engrenagens de uma máquina.
Anteriormente, Gershenfeld e seus alunos mostraram que as estruturas montadas a partir de muitos pequenos, subunidades idênticas podem ter várias propriedades mecânicas. Próximo, eles demonstraram que uma combinação de tipos de peças rígidas e flexíveis pode ser usada para criar asas de avião que se transformam, uma meta de longa data na engenharia aeroespacial. Seu trabalho mais recente adiciona componentes para movimento e lógica, e será apresentado na Conferência Internacional de Manipulação, Automação e Robótica em Pequenas Escalas (MARSS) em Helsinque, Finlândia, em um artigo de Gershenfeld e do estudante de graduação do MIT Will Langford.
Seu trabalho oferece uma alternativa às abordagens atuais para a construção de robôs, que se enquadram em um de dois tipos:máquinas personalizadas que funcionam bem, mas são relativamente caras e inflexíveis, e reconfiguráveis que sacrificam o desempenho pela versatilidade. Na nova abordagem, Langford criou um conjunto de componentes em escala de cinco milímetros, todos os quais podem ser conectados uns aos outros por um conector padrão. Essas peças incluem os tipos rígidos e flexíveis anteriores, junto com peças eletromagnéticas, uma bobina, e um ímã. No futuro, a equipe planeja fazer isso com tipos de peças básicas ainda menores.
Crédito:MIT
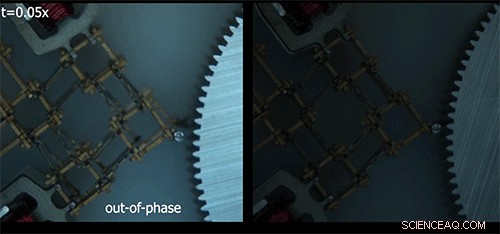
Usando este kit simples de peças minúsculas, Langford os montou em um novo tipo de motor que move um apêndice em etapas mecânicas discretas, que pode ser usado para girar uma roda dentada, e uma forma móvel do motor que transforma essas etapas em locomoção, permitindo que ele "caminhe" por uma superfície de uma forma que lembra os motores moleculares que movem os músculos. Essas peças também podem ser montadas em mãos para agarrar, ou pernas para caminhar, conforme necessário para uma tarefa específica, e depois remontado conforme essas necessidades mudam. Gershenfeld se refere a eles como "materiais digitais, "partes discretas que podem ser unidas de forma reversível, formando uma espécie de micro-LEGO funcional.
O novo sistema é um passo significativo para a criação de um kit padronizado de peças que poderia ser usado para montar robôs com capacidades específicas adaptadas a uma tarefa ou conjunto de tarefas em particular. Esses robôs construídos de propósito podem então ser desmontados e remontados conforme necessário em uma variedade de formas, sem a necessidade de projetar e fabricar novos robôs do zero para cada aplicação.
O motor inicial de Langford tem uma capacidade semelhante à de uma formiga de levantar sete vezes seu próprio peso. Mas se forças maiores são necessárias, muitas dessas partes podem ser adicionadas para fornecer mais potência. Ou se o robô precisa se mover de maneiras mais complexas, essas partes podem ser distribuídas por toda a estrutura. O tamanho dos blocos de construção pode ser escolhido para corresponder à sua aplicação; a equipe fez peças do tamanho de nanômetros para fazer nanorrobôs, e peças do tamanho de um metro para fazer megarobôs. Anteriormente, técnicas especializadas eram necessárias em cada um desses extremos da escala de comprimento.
"Uma aplicação emergente é fazer pequenos robôs que podem trabalhar em espaços confinados, "Gershenfeld diz. Alguns dos dispositivos montados neste projeto, por exemplo, são menores do que um centavo, mas podem realizar tarefas úteis.
Para construir nos "cérebros, "Langford adicionou tipos de peças que contêm circuitos integrados de tamanho milimétrico, junto com alguns outros tipos de peças para cuidar da conexão de sinais elétricos em três dimensões.
A simplicidade e regularidade dessas estruturas torna relativamente fácil a automatização de sua montagem. Fazer isso, Langford desenvolveu uma nova máquina que é como um cruzamento entre uma impressora 3-D e as máquinas pick-and-place que fabricam circuitos eletrônicos, mas ao contrário de qualquer um desses, este pode produzir sistemas robóticos completos diretamente de projetos digitais. Gershenfeld diz que esta máquina é um primeiro passo em direção ao objetivo final do projeto de "fazer um montador que possa se montar sozinho com as peças que está montando".
"A padronização é uma questão extremamente importante em microrobóticos, para reduzir os custos de produção e, como resultado, para melhorar a aceitação desta tecnologia ao nível de robôs industriais regulares, "diz Sergej Fatikow, chefe da Divisão de Microrrobótica e Engenharia de Controle, na Universidade de Oldenburg, Alemanha, que não se associou a esta pesquisa. O novo trabalho "trata da montagem de sistemas microrobóticos sofisticados a partir de um pequeno conjunto de blocos de construção padrão, que pode revolucionar o campo da microrobótica e abrir inúmeras aplicações em pequena escala, " ele diz.
Esta história foi republicada por cortesia do MIT News (web.mit.edu/newsoffice/), um site popular que cobre notícias sobre pesquisas do MIT, inovação e ensino.