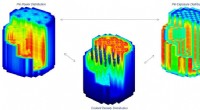
Saída da rede neural para controlar os motores do robô. Crédito:Blanchard, Aihara e Levi.
Nos últimos anos, um número crescente de estudos tem sido direcionado ao desenvolvimento de robôs inspirados na natureza, particularmente por certas espécies de animais. Em um estudo publicado no Atlantis Press 'Journal of Robotics, Rede e Vida Artificial, uma equipe de pesquisadores da Universidade de Bordeaux e da Universidade de Tóquio criou um robô que se assemelha a uma cobra tanto em sua forma quanto em seus movimentos.
“O objetivo principal desta pesquisa foi desenvolver um robô para aplicações biomédicas, especialmente lesões da medula espinhal, "Timothée Levi, um dos pesquisadores que realizou o estudo, disse TechXplore. “Gostaríamos de projetar novas neuropróteses onde os neurônios artificiais possam substituir os biológicos. Em nosso robô, usamos uma locomoção biomimética usando redes neurais biomiméticas de spiking, que reproduz o mesmo comportamento que as cobras têm na natureza. "
Um dos principais desafios ao desenvolver robôs bioinspirados é reproduzir com eficácia a locomoção do animal de interesse. Em animais, a maioria dos movimentos são gerados pela atividade de redes de geração de padrão central (CPG).
Essencialmente, CPGs são circuitos neuronais que, quando ativado, pode produzir padrões motores rítmicos (por exemplo, caminhar, respirando, natação, etc.) na ausência de entradas sensoriais e relacionadas ao tempo. No passado, Os CPGs e seus efeitos na locomoção animal têm sido o foco de um grande número de estudos.
Geralmente, pesquisadores que estão tentando desenvolver robôs semelhantes a animais replicam CPGs usando modelos de neurônios simples ou osciladores, que não são escalas de tempo biológicas, e são, portanto, considerados sistemas bioinspirados em vez de bioiméticos. Esses modelos, Contudo, simplesmente fornecem oscilações sinusoidais, e, portanto, são incapazes de reproduzir fielmente uma variedade de padrões de locomoção animal.
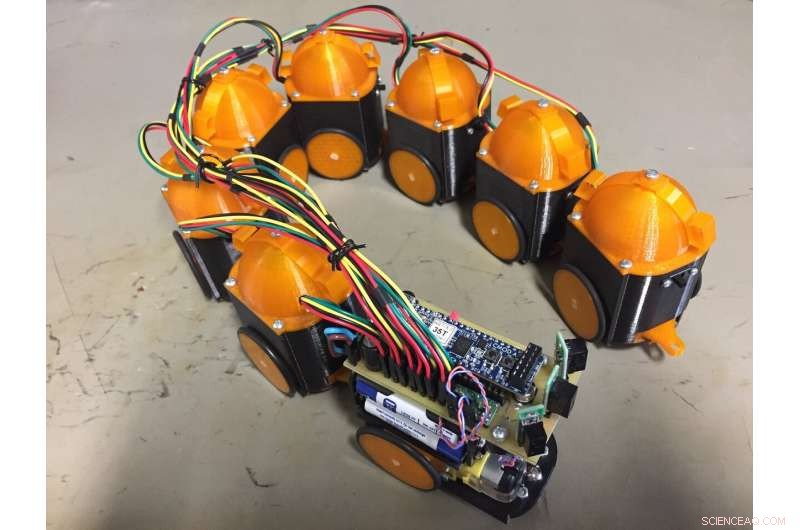
O robô cobra desenvolvido pelos pesquisadores. Crédito:Blanchard, Aihara e Levi.
Em seu estudo, Levi e seus colegas começaram a desenvolver CPGs biomiméticos que podem replicar efetivamente o comportamento biológico, usando um sistema neuromórfico digital em tempo real. O robô cobra que desenvolveram tem dois componentes principais, um atuando como seu cérebro e o outro como seu corpo.
"Nosso robô cobra pode ser dividido em 2 partes, "Levi explicou." O primeiro é o cérebro, usando redes neurais biomiméticas. Esta rede neural é muito próxima da biologia com o modelo biofísico de neurônios, sinapses e plasticidade. A segunda parte é o corpo, que tem diferentes "vagões" que modelam as diferentes partes da medula espinhal e segmentos de cobras. O sinal é criado pelo cérebro da cobra e é propagado em todo o corpo controlando os diferentes motores. "
O robô cobra criado por Levi e seus colegas é controlado em tempo real por uma rede de CPGs biomiméticos. Os pesquisadores mostraram que seu sistema pode ser conectado a neurônios biológicos e também pode ser usado para simular diferentes hipóteses ou tratamentos de protocolo para aplicações biomédicas, como lesões da medula espinhal e neuroprostéticos.
"Na minha opinião, o aspecto mais significativo de nosso estudo é que tentamos ser fiéis à biologia e conseguimos incorporar a rede neural em uma pequena esfera eletrônica, "Levi disse." Curiosamente, o robô que criamos está trabalhando em tempo real e tem as mesmas especificações da natureza (período de locomoção, variabilidade, barulho, etc.). "
No futuro, o robô cobra desenvolvido por Levi e seus colegas pode ter uma variedade de aplicações interessantes em robótica e outros campos. Por exemplo, ele poderia ser usado para entender melhor o comportamento dos reptilianos ou poderia ter várias aplicações de robótica bio-híbrida.
"Agora estamos planejando adicionar mais inteligência ao cérebro do robô com regras de aprendizagem, além de usar os diferentes sensores, "Levi disse." Além disso, um dos nossos objetivos de longo prazo é combinar neurônios artificiais e neurônios vivos para criar um robô bio-híbrido. "
© 2019 Science X Network