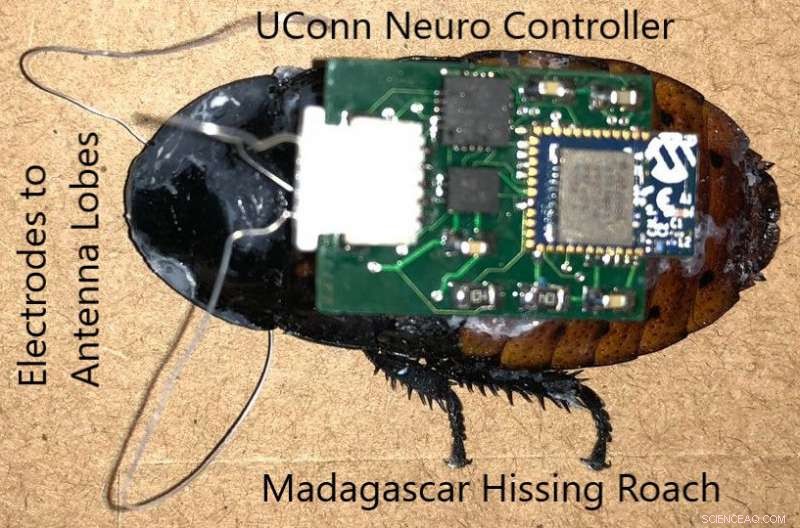
Uma barata com um neurocontrolador implantado. Crédito:the Dutta Lab
Uma barata do tamanho de um grande clipe de papel corre pelo chão do laboratório de Abhishek Dutta na Universidade de Connecticut.
Alguns cientistas podem ficar chocados ao ver um visitante tão notório ocupando seu espaço de pesquisa.
Mas não Dutta. Ele observa atentamente enquanto a barata se move para a esquerda, e então certo, então saiu de novo, à medida que atravessa o piso frio de ladrilhos. Seu interesse é bem fundamentado, pois é ele quem inicia os movimentos da minúscula criatura com um pequeno dispositivo portátil a cerca de 4,5 metros de distância.
A barata sibilante de Madagascar neste laboratório não é qualquer velho membro da ordem Blattodea. É um híbrido robô-barata, um inseto biológico conectado - um ciborgue, se preferir - e seus futuros irmãos de alta tecnologia podem um dia salvar sua vida.
“O uso de insetos como plataformas para pequenos robôs tem um número incrível de aplicações úteis, de busca e resgate à defesa nacional, "diz Dutta, professor assistente de engenharia elétrica e da computação, especializado em otimização de sistemas de controle e sistemas ciberfísicos.
Robôs de baratas não são novos, Contudo. Os pesquisadores têm explorado plataformas biorobóticas para insetos durante a maior parte da última década. Mas construir sistemas robóticos em escala tão pequena não é fácil, e a tecnologia parece funcionar apenas na metade do tempo.
Em um artigo a ser publicado em breve em Proceedings of the Conference on Cognitive Computational Neuroscience , Filadélfia 2018, Dutta, e o estudante Evan Faulkner, um júnior trabalhando em seu laboratório, relatam a criação de um microcircuito que, segundo eles, permite um controle mais confiável e preciso do movimento dos insetos robóticos.
Para melhorar o controle do inseto, O microcircuito de Dutta incorpora uma unidade de medição inercial de 9 eixos que pode detectar os seis graus de movimento livre da barata, sua aceleração linear e rotacional, e a direção da bússola. Outra característica que Dutta e Faulkner adicionaram é a temperatura ambiente ao redor da criatura, porque os testes mostraram que a temperatura do ambiente em que uma barata se move pode afetar como e onde o inseto se move. Baratas, para o registro, são mais propensos a passear quando está quente.
O microcircuito criado por Dutta e Faulkner faz parte de uma pequena 'mochila' eletrônica que pode ser amarrada às costas de uma barata. Os fios do dispositivo são presos aos lóbulos da antena do inseto. Um minúsculo transmissor e receptor Bluetooth permite que um operador próximo controle os movimentos da barata por meio de um telefone celular comum. O envio de minúsculos impulsos elétricos ao tecido nervoso no lóbulo direito ou esquerdo da antena do inseto faz com que ele acredite que encontrou um obstáculo. Uma pequena carga na antena esquerda faz com que o inseto se mova para a direita. Da mesma forma, uma carga enviada para a antena direita faz o inseto se mover para a esquerda. É a direção hidráulica redefinida.
Enquanto outros laboratórios desenvolveram sistemas de controle semelhantes, O microcircuito UConn é distinto por oferecer aos operadores um maior grau de controle do movimento do inseto, feedback em tempo real da resposta neuromuscular do inseto a estímulos artificiais, e avenidas multicanais para estimular o tecido nervoso do inseto. O resultado é um sistema de controle mais informado e preciso.
O microcontrolador e o potenciômetro embutido do sistema UConn permitem que os operadores variem a tensão de saída, frequência, e ciclo dos estímulos enviados ao inseto. (Um potenciômetro, se você está se perguntando, é o nome próprio de um dispositivo eletrônico que ajusta a tensão. É o que torna possíveis os interruptores do dimmer de luz, e permite que você ajuste o volume do seu aparelho de som.) O estímulo que resultou na resposta mais robusta da barata foi em torno de 1,2 V de amplitude, Frequência de 55 Hz, e 50 por cento do ciclo de trabalho. (Nenhuma barata foi ferida por esses experimentos, a propósito.)
Um dado interessante que os pesquisadores notaram foi que os movimentos da barata para a esquerda ou para a direita em resposta à estimulação artificial diminuíram de intensidade após o estímulo inicial. Então, se a barata fez uma curva fechada para a esquerda após o primeiro pulso eletrônico atingir o lóbulo da antena direita, sua vez era menos dramática com cada pulso subsequente naquele lóbulo. Os pesquisadores não sabem ao certo por que isso acontece, mas é uma informação útil saber quando é você quem está dirigindo.
Mais importante, Dutta diz, o sistema permitiu que os usuários utilizassem o feedback em tempo real enviado pelo sistema Bluetooth para definir parâmetros específicos para estimular os lóbulos das antenas do inseto, e isso permitiu que eles conduzissem o inseto na direção desejada.
"Nosso microcircuito fornece um sistema sofisticado para adquirir dados em tempo real sobre a direção e aceleração de um inseto, o que nos permite extrapolar sua trajetória, "diz Dutta." Acreditamos neste ciclo fechado avançado, sistema baseado em modelo fornece melhor controle para manobras de precisão, e supera algumas das limitações técnicas que afetam os micro-robôs de hoje. "
Embora o novo microcircuito seja certamente um passo à frente para a tecnologia de robôs de insetos, Dutta reconhece que muito mais pesquisas são necessárias. Biobots movidos a insetos, pode-se dizer, ainda estão em seu estágio larval. Avanços contínuos no design de micro-hardware e sistemas de micro-controle podem levar a uma nova geração de dispositivos que funcionam ainda melhor.