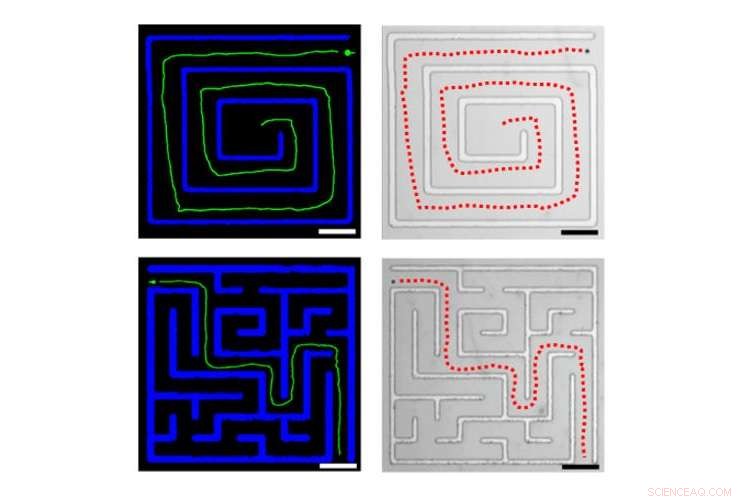
Trajetórias de um microveículo através de labirintos. O trajeto é planejado por um sistema de inteligência artificial e o microveículo é guiado por campos magnéticos. Crédito:Li et al. © 2017 American Chemical Society
(Phys.org) —Em um novo estudo, os cientistas desenvolveram a versão em microescala dos veículos autônomos:um micromotor esférico de 5 μm que navega autonomamente pelo micro-tráfego ao longo de um micro labirinto para chegar ao seu destino final. Os pesquisadores esperam que esses "microveículos inteligentes" tenham aplicações potenciais em tarefas biomédicas, como a entrega de medicamentos às células tumorais, evitando as células saudáveis.
Os cientistas, liderado por Longqiu Li no Instituto de Tecnologia de Harbin na China, e Joseph Wang, da Universidade da Califórnia em San Diego, nos Estados Unidos, publicaram um artigo sobre os microveículos inteligentes em uma edição recente da ACS Nano .
"Incorporamos inteligência artificial em um micro / nanorrobô, "Li disse Phys.org . "Apresentamos um microveículo inteligente para navegação autônoma precisa em ambientes complicados e que mudam dinamicamente por meio de um planejamento de caminho ideal. Semelhante aos seus homólogos de veículos grandes, a navegação autônoma de microveículos implica movimento livre de colisões em ambientes dinâmicos. "
Até agora, micro e nanomáquinas foram restritas à navegação que usa um sistema de controle de circuito fechado, em que as máquinas só podem se mover ao longo de um caminho predefinido. O novo estudo marca a primeira demonstração de micro-máquinas que podem navegar de forma autônoma em complexos, ambientes que mudam dinamicamente, como aqueles com outras micromáquinas móveis.
O processo de navegação autônoma consiste em três etapas principais. Uma câmera CCD acoplada a um microscópio tira fotos e as envia para um processador de extração de recursos, que identifica obstáculos e constrói um mapa do ambiente. O mapa é então enviado como entrada para um planejador de Inteligência Artificial (IA), que usa um algoritmo de busca de caminho e abordagem de lógica difusa para determinar o caminho livre de colisão mais curto entre os vários caminhos possíveis para o destino. O planejador de IA, então, envia essas instruções de viagem para um gerador de campo magnético, que orienta um campo magnético de forma a direcionar o microveículo ao longo da via livre de colisão.
O planejador de IA, que está no cerne do sistema de navegação inteligente, também pode detectar quando o microveículo se desvia de seu caminho planejado, que pode ocorrer devido à presença de ruído. Nesses casos, o planejador de IA pode medir o erro simultaneamente e guiar o microveículo de volta ao caminho.
Uma das principais aplicações deste tipo de microveículo inteligente pode ser na área biomédica para tarefas como diagnóstico de doenças, entrega de drogas, e cirurgia de precisão. Para demonstrar, os pesquisadores mostraram que o microveículo pode usar a câmera para detectar e distinguir entre as células cancerosas, glóbulos vermelhos, e células mistas, reconhecendo as diferenças em seu tamanho e forma. O planejador de IA, então, considera as células cancerosas como os alvos e as outras células como os obstáculos, e planeja um caminho de acordo.
“Queremos aplicar os sistemas micro / nanorobóticos no campo das operações biomédicas e manipulação em nanoescala, "Li disse.
No futuro, os cientistas planejam desenvolver microveículos autônomos mais sofisticados, com recursos como frenagem autônoma, controle de "cruzeiro", manutenção de faixa, e a capacidade de interagir com o meio ambiente.
© 2017 Phys.org