Uso de sensores táteis e aprendizado de máquina para melhorar a forma como os robôs manipulam tecidos

1) Aproximamo-nos inicialmente do tecido e depois 2) Tentamos agarrar um certo número de camadas de tecido. Usando o sensor tátil, determinamos se estamos segurando o número correto de camadas e 3) reajustamos o tecido conforme necessário. Finalmente, 4) levantamos o pano com o número correto de camadas agarradas. Crédito:Tirumala et al.
Nos últimos anos, os roboticistas têm tentado melhorar a forma como os robôs interagem com diferentes objetos encontrados em ambientes do mundo real. Enquanto alguns de seus esforços produziram resultados promissores, as habilidades de manipulação da maioria dos sistemas robóticos existentes ainda estão atrás das dos humanos.
Os tecidos estão entre os tipos de objetos que provaram ser mais desafiadores para o robô interagir. As principais razões para isso são que pedaços de tecido e outros tecidos podem ser esticados, movidos e dobrados de diferentes maneiras, o que pode resultar em dinâmicas complexas de materiais e auto-oclusões.
Pesquisadores do Instituto de Robótica da Universidade Carnegie Mellon propuseram recentemente uma nova técnica computacional que poderia permitir que os robôs entendessem e manuseassem melhor os tecidos. Essa técnica, apresentada em um paper set a ser apresentado na International Conference on Intelligent Robots and Systems e pré-publicado no arXiv, é baseada no uso de um sensor tátil e um algoritmo simples de aprendizado de máquina, conhecido como classificador.
“Estamos interessados na manipulação de tecidos porque tecidos e objetos deformáveis em geral são desafiadores para os robôs manipularem, pois sua deformabilidade significa que eles podem ser configurados de muitas maneiras diferentes”, Daniel Seita, um dos pesquisadores que realizou o estudo, disse TechXplore. "Quando começamos este projeto, sabíamos que havia muito trabalho recente em robôs manipulando tecidos, mas a maior parte desse trabalho envolve a manipulação de um único pedaço de tecido. Nosso artigo aborda as direções relativamente menos exploradas de aprender a manipular um pilha de tecido usando sensor tátil."
A maioria das abordagens existentes para permitir a manipulação de tecidos em robôs são baseadas apenas no uso de sensores de visão, como câmeras ou geradores de imagens que coletam apenas dados visuais. Embora alguns desses métodos tenham obtido bons resultados, sua dependência de sensores visuais pode limitar sua aplicabilidade para tarefas simples que envolvem a manipulação de um único pedaço de pano.
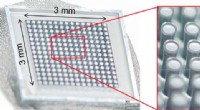
O novo método idealizado por Seita e seus colegas Sashank Tirumala e Thomas Weng, por outro lado, usa dados coletados por um sensor tátil chamado ReSkin, que pode inferir informações relacionadas à textura de um material e sua interação com o ambiente. Usando esses dados táteis, a equipe treinou um classificador para determinar o número de camadas de tecido agarradas por um robô.
"Nossos dados táteis vieram do sensor ReSkin, que foi desenvolvido recentemente na CMU no ano passado", explicou Weng. "Usamos este classificador para ajustar a altura de uma pinça para agarrar uma ou duas camadas de tecido superiores de uma pilha de tecidos."
Para avaliar sua técnica, a equipe realizou 180 ensaios experimentais em um cenário do mundo real, usando um sistema robótico composto por um braço robótico Franka, uma pinça mini-Delta e um sensor Reskin (integrado no "dedo" da pinça para agarrar um ou dois pedaços de pano em uma pilha. Sua abordagem alcançou resultados promissores, superando os métodos de linha de base que não consideram o feedback tátil.
"Em comparação com abordagens anteriores que usam apenas câmeras, nossa abordagem baseada em sensor tátil não é afetada por padrões no tecido, mudanças na iluminação e outras discrepâncias visuais", disse Tirumala. "Ficamos empolgados ao ver que a detecção tátil de dispositivos eletromagnéticos como o sensor ReSkin pode fornecer um sinal suficiente para uma tarefa de manipulação refinada, como agarrar uma ou duas camadas de tecido. Acreditamos que isso motivará pesquisas futuras em detecção tátil para tecidos manipulação por robôs."
No futuro, Tirumala, Weng, Seita e seus colegas esperam que essa abordagem de manipulação possa ajudar a aprimorar as capacidades de robôs projetados para serem implantados em instalações de fabricação de tecidos, serviços de lavanderia ou em residências. Especificamente, poderia melhorar a capacidade desses robôs de lidar com tecidos complexos, várias peças de pano, lavanderia, cobertores, roupas e outros objetos baseados em tecido.
"Nosso plano é continuar a explorar o uso do sensor tátil para captar um número arbitrário de camadas de tecido, em vez de uma ou duas camadas que focamos neste trabalho", acrescentou Weng. "Além disso, estamos investigando abordagens multimodais que combinam visão e sensação tátil para que possamos aproveitar as vantagens de ambas as modalidades de sensores".
+ Explorar mais Geração de dados sensoriais multimodais para percepção visual-tátil robótica
© 2022 Science X Network