Uma estrutura de aprendizado por reforço para melhorar as habilidades de arremesso de futebol de robôs quadrúpedes
Crédito:Ji et al.
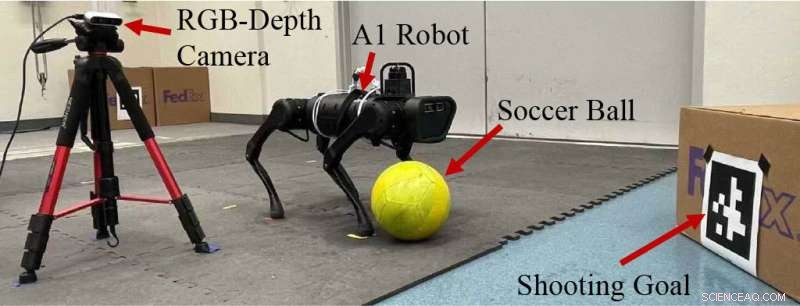
Pesquisadores da Universidade da Califórnia, Berkeley (UC Berkeley), Université de Montréal e Mila desenvolveram recentemente uma estrutura hierárquica de aprendizado por reforço para melhorar a precisão de robôs quadrúpedes no arremesso de futebol. Este framework, introduzido em um artigo pré-publicado no arXiv, foi implantado em um Unitree A1, um robô quadrúpede desenvolvido pela UnitreeRobotics.
“As pernas humanas não são apenas para locomoção, mas também podem ser usadas para manipulação, como jogar futebol, e queremos permitir que robôs quadrúpedes também alcancem essa habilidade”, disse Zhongyu Li, um dos pesquisadores que realizaram o estudo, ao TechXplore. "Existe uma liga notável na comunidade de robótica chamada 'RoboCup' (Robot World Cup), que vem convidando pesquisadores a treinar seus robôs para jogar futebol há décadas."
Avanços recentes permitiram a criação de hardware mais confiável e algoritmos de controle avançados para robôs. Como resultado, os robôs agora são mais ágeis e podem lidar com tarefas mais complexas, incluindo jogar futebol ao lado de humanos. A estrutura desenvolvida por Li e seus colegas pode ajudar a melhorar a capacidade dos robôs quadrúpedes de arremessar a bola durante os jogos de futebol.
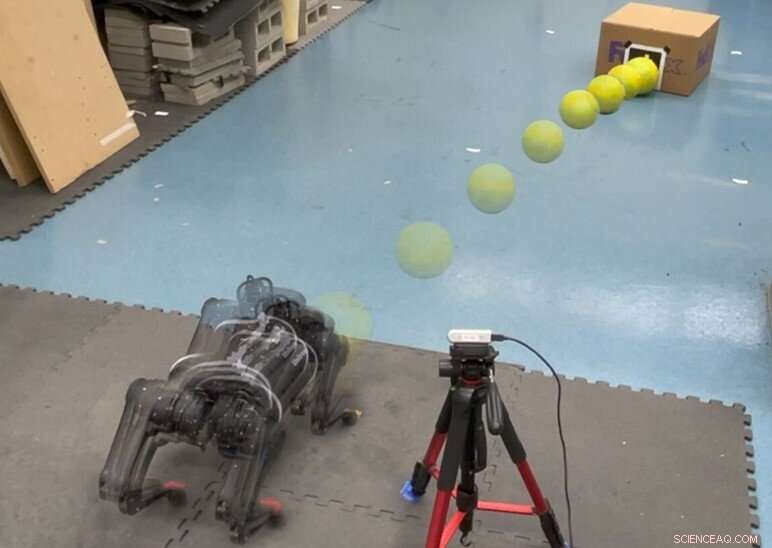
A nova estrutura tem dois componentes principais:uma política de controle de movimento e uma política de planejamento de movimento. O componente de controle de movimento permite que o robô rastreie uma trajetória arbitrária para o dedo do pé em sua perna de chute. A política de planejamento de movimento, por outro lado, seleciona uma trajetória ideal do dedo do pé para arremessar uma bola de futebol próxima (detectada por uma câmera externa) para um local alvo (por exemplo, a trave).
Crédito:Ji et al.
"Nosso design nos permite dissociar o desafio da tarefa de chute de futebol preciso em duas subtarefas:controle e planejamento", disse Li. "Primeiro podemos nos concentrar em treinar uma política de controle robusta que possa funcionar no hardware e, em seguida, reutilizar esse controlador para aprender a estratégia de planejamento. -dados mundiais quando o robô está atirando a bola de futebol real."
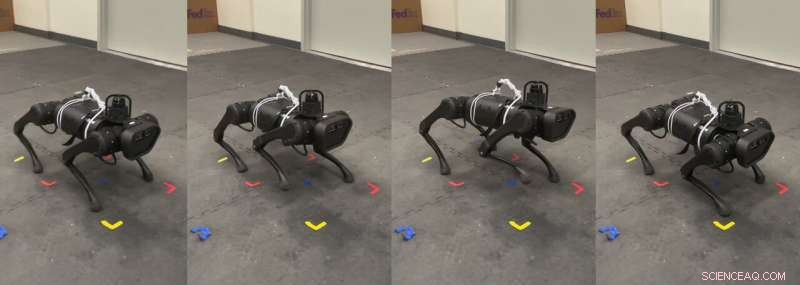
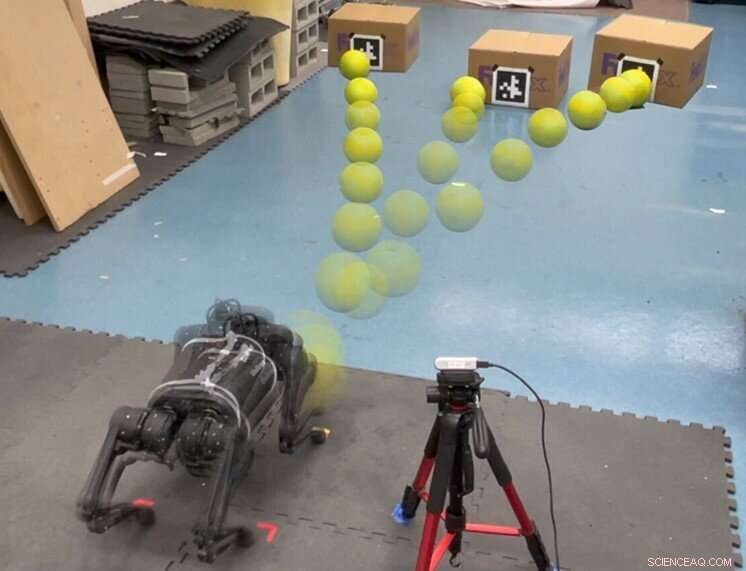
Li e seus colegas testaram sua estrutura em uma série de testes do mundo real, usando um robô quadrúpede A1. Eles descobriram que isso permitia que o robô atirasse uma bola de futebol deformável em alvos aleatórios com alta precisão. Esta é uma tarefa muito complexa de enfrentar, pois o robô precisa balançar a perna de chute rapidamente e ganhar impulso sem perder o equilíbrio.
“A bola de futebol apresenta mais desafios porque o robô precisa lidar não apenas com o contato macio difícil de modelar com a bola deformável, mas também com as incertezas do atrito de rolamento entre a bola e o solo”, disse Li. "A metodologia que desenvolvemos para resolver esses problemas pode ser potencialmente útil para as tarefas em que robôs dinâmicos, como robôs com pernas, precisam interagir com objetos macios, como bola, cordas, coleira, roupas etc."
-

Crédito:Ji et al.
-
Crédito:Ji et al.
-
Crédito:Ji et al.
Futuramente, o framework criado por essa equipe de pesquisadores poderá ser utilizado para melhorar o desempenho de robôs em torneios de futebol, principalmente o Robocup. Enquanto isso, Li e seus colegas planejam desenvolver outras estruturas e modelos de aprendizado de máquina para melhorar o desempenho de robôs em outros elementos do futebol.
"Nosso objetivo de longo prazo é desenvolver jogadores de futebol robóticos quadrúpedes que possam um dia competir com humanos", acrescentou Li. “Estamos desenvolvendo habilidades de futebol mais complexas usando robôs quadrúpedes e esperamos que, em um futuro próximo, possamos iniciar um jogo de futebol totalmente autônomo usando robôs quadrúpedes”.
+ Explorar mais Um algoritmo de Q-learning para gerar chutes para robôs ambulantes em simulações de futebol
© 2022 Science X Network