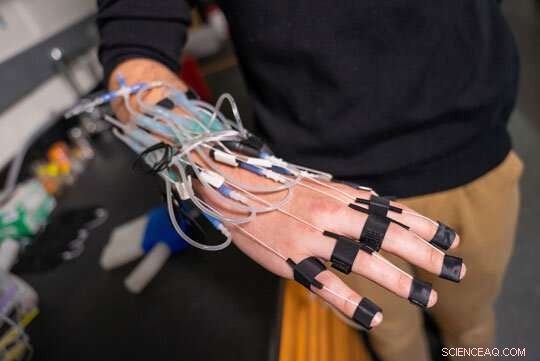
O estudante da Rice University Colter Decker, formado em engenharia mecânica, demonstra uma luva que foi usada para demonstrar os recursos analógicos de circuitos de controle pneumático suave para robótica suave. Crédito:Brandon Martin/Rice University
Adicione analógico e acionado por ar à lista de opções de sistema de controle para robôs macios.
Em um estudo publicado online esta semana, pesquisadores de robótica, engenheiros e cientistas de materiais da Universidade Rice e da Universidade de Harvard mostraram que é possível fazer circuitos não eletrônicos programáveis que controlam as ações de robôs macios processando informações codificadas em rajadas de ar comprimido.
"Parte da beleza deste sistema é que somos realmente capazes de reduzir a computação a seus componentes básicos", disse Colter Decker, estudante de Rice, principal autor do estudo no
Proceedings of the National Academy of Sciences eu> . Ele disse que os sistemas de controle eletrônico foram aprimorados e refinados por décadas, e a recriação de circuitos de computador "com análogos à pressão e taxa de fluxo em vez de tensão e corrente" tornou mais fácil incorporar a computação pneumática.
Decker, formado em engenharia mecânica, construiu seu sistema de controle robótico macio principalmente com materiais do dia a dia, como canudos de plástico e elásticos. Apesar de sua simplicidade, os experimentos mostraram que as portas lógicas acionadas por ar do sistema podem ser configuradas para executar operações chamadas funções booleanas, que são a carne e as batatas da computação moderna.
Crédito:Rice University "O objetivo nunca foi substituir totalmente os computadores eletrônicos", disse Colter. Ele disse que há muitos casos em que robôs macios ou wearables precisam ser programados apenas para alguns movimentos simples, e é possível que a tecnologia demonstrada no artigo "seria muito mais barata e segura para uso e muito mais durável" do que os controles eletrônicos tradicionais.
Como calouro, Decker começou a trabalhar no laboratório de Daniel Preston, professor assistente de engenharia mecânica na Rice. Decker estudou sistemas de controle fluídico e se interessou em criar um quando ganhou uma bolsa competitiva de pesquisa de verão que lhe permitiria passar alguns meses trabalhando no laboratório do químico e cientista de materiais de Harvard George Whitesides.
O projeto se transformou em uma colaboração de meses entre os dois grupos de pesquisa, e Decker teve nove coautores no estudo, incluindo os autores correspondentes Preston e Whitesides.
Decker e seus colegas criaram dois componentes, um atuador semelhante a um pistão que traduz a pressão do ar em força mecânica e uma válvula que pode ser alternada entre dois estados – ligado e desligado. Os componentes foram feitos de peças que incluíam canudos de plástico, tubos de plástico flexível, elásticos, papel manteiga e folhas de poliuretano termoplástico que podiam ser coladas com uma prensa térmica de mesa ou um ferro quente.
A equipe de pesquisa mostrou que os dois componentes podem ser combinados em um único dispositivo, uma válvula biestável que funciona como um interruptor e usa a pressão do ar como entrada e saída. Uma quantidade específica de pressão de ar é necessária para alternar entre os estados desligado e ligado. As válvulas são mantidas fechadas por elásticos e são programadas adicionando ou subtraindo elásticos, o que altera a quantidade de pressão necessária para a ativação. Nos testes, Decker mostrou que os circuitos podem ser usados para controlar um robô macio em forma de mão, uma almofada pneumática e um robô do tamanho de uma caixa de sapatos que pode andar um número pré-programado de passos, recuperar um objeto e retornar ao seu local de partida.
"A maior conquista neste trabalho é a incorporação do controle digital e analógico na mesma arquitetura do sistema", disse Preston. Ter ambos significa que os circuitos de controle pneumático podem ser programados digitalmente, com os "uns e zeros que você pensa em um computador tradicional. Mas também podemos trazer recursos analógicos, coisas que são contínuas", disse ele. "Isso nos permite realmente simplificar a arquitetura geral do sistema e obter novos recursos que não eram acessíveis em trabalhos anteriores."
+ Explorar mais Os wearables dão um passo 'lógico' em direção ao controle integrado