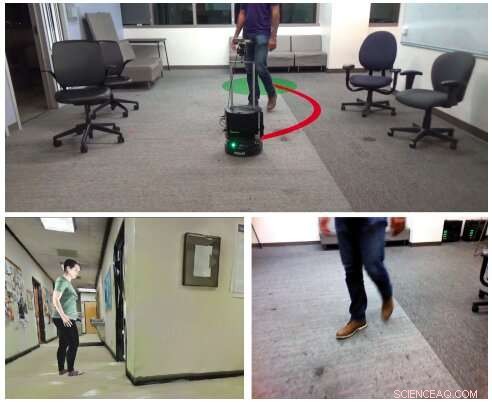
(Topo) Um cenário de navegação visual autônomo considerado pelos pesquisadores, em um anteriormente desconhecido, ambiente interno com humanos, usando imagens RGB monoculares (canto inferior direito). Para ensinar as máquinas a navegar em ambientes internos contendo humanos, os pesquisadores criaram o HumANav, um conjunto de dados que permite renderização fotorrealística em ambientes simulados (por exemplo, canto inferior esquerdo). Crédito:Tolani et al.
A fim de lidar com as tarefas para as quais foram projetados, robôs móveis devem ser capazes de navegar em ambientes do mundo real de forma eficiente, evitando humanos ou outros obstáculos em seus arredores. Embora os objetos estáticos sejam normalmente fáceis de serem detectados e contornados pelos robôs, evitar os humanos pode ser mais desafiador, pois envolve prever seus movimentos futuros e planejar de acordo.
Pesquisadores da Universidade da Califórnia, Berkeley, desenvolveram recentemente uma nova estrutura que pode melhorar a navegação do robô entre humanos em ambientes internos, como escritórios, casas ou museus. O modelo deles, apresentado em um artigo pré-publicado no arXiv, foi treinado em um conjunto de dados recém-compilado de imagens fotorrealistas chamado HumANav.
"Propomos uma nova estrutura para navegação em torno dos humanos que combina a percepção baseada na aprendizagem com controle ótimo baseado em modelo, "escreveram os pesquisadores em seu artigo.
A nova estrutura que esses pesquisadores desenvolveram, apelidado de LB-WayPtNav-DH, tem três componentes principais:uma percepção, um planejamento, e um módulo de controle. O módulo de percepção é baseado em uma rede neural convolucional (CNN) que foi treinada para mapear a entrada visual do robô em um ponto de passagem (ou seja, o próximo estado desejado) usando aprendizado supervisionado.
O waypoint mapeado pela CNN é então alimentado para os módulos de planejamento e controle do framework. Combinado, esses dois módulos garantem que o robô se mova para seu local de destino com segurança, evitando quaisquer obstáculos e humanos em seus arredores.
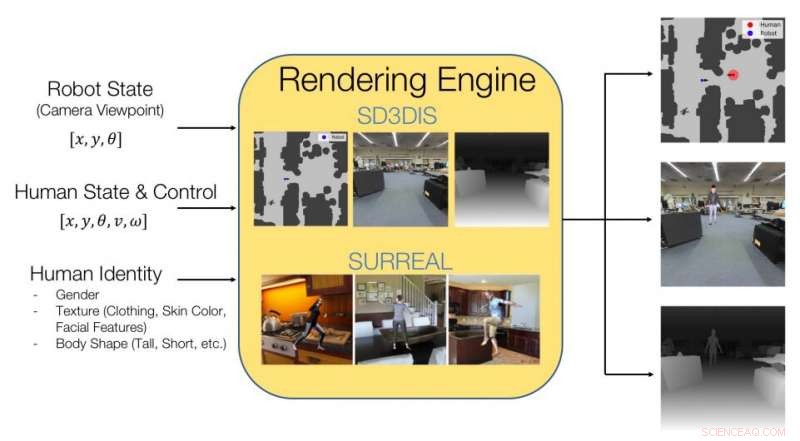
Imagem explicando o que o conjunto de dados HumANav contém e como ele consegue renderização fotorrealística de ambientes internos contendo humanos. Crédito:Tolani et al.
Os pesquisadores treinaram sua CNN em imagens incluídas em um conjunto de dados que eles compilaram, apelidado de HumANav. HumANav contém fotorrealista, imagens renderizadas de ambientes de construção simulados nos quais humanos se movem, adaptado de outro conjunto de dados denominado SURREAL. Essas imagens retratam 6.000 caminhando, malhas humanas texturizadas, organizado pela forma do corpo, gênero e velocidade.
"A estrutura proposta aprende a antecipar e reagir ao movimento das pessoas com base apenas em uma imagem RGB monocular, sem prever explicitamente o movimento humano futuro, "escreveram os pesquisadores em seu artigo.
Os pesquisadores avaliaram LB-WayPtNav-DH em uma série de experimentos, tanto em simulações quanto no mundo real. Em experimentos do mundo real, eles o aplicaram ao Turtlebot 2, um robô móvel de baixo custo com software de código aberto. Os pesquisadores relatam que a estrutura de navegação do robô generaliza bem para edifícios invisíveis, contornar efetivamente os humanos em ambientes simulados e reais.
"Nossos experimentos demonstram que a combinação de controle baseado em modelo e aprendizado leva a comportamentos de navegação melhores e mais eficientes em termos de dados em comparação com uma abordagem puramente baseada em aprendizado, "escreveram os pesquisadores em seu artigo.
A nova estrutura poderia ser aplicada a uma variedade de robôs móveis, melhorando sua navegação em ambientes internos. Até aqui, sua abordagem provou ter um desempenho muito bom, transferência de políticas desenvolvidas em simulação para ambientes do mundo real.
Em seus estudos futuros, os pesquisadores planejam treinar sua estrutura em imagens de ambientes mais complexos ou lotados. Além disso, eles gostariam de ampliar o conjunto de dados de treinamento que compilaram, incluindo um conjunto mais diversificado de imagens.
© 2020 Science X Network