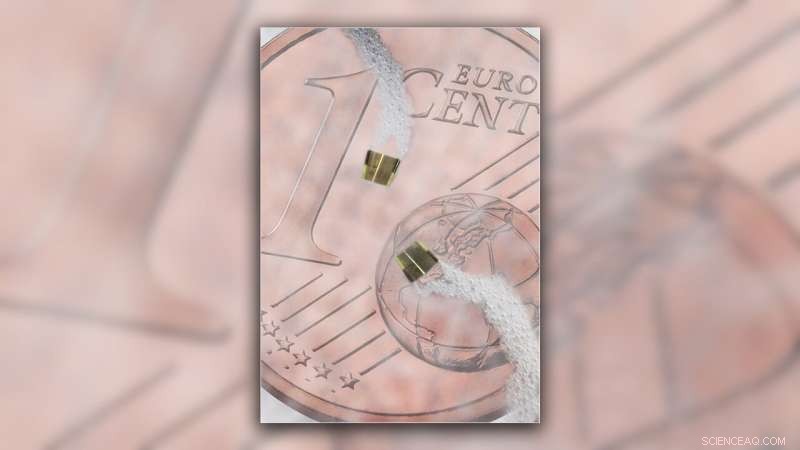
Os menores microrrobôs eletrônicos autopropelidos desenvolvidos pelos pesquisadores manobram em líquido em cima de uma moeda de 1 centavo de euro. Crédito:TU Chemnitz.
Uma equipe de pesquisa internacional liderada pelo Dr. Oliver Schmidt, trabalhando na Universidade de Tecnologia de Chemnitz (TU Chemnitz) e Leibniz IFW Dresden desenvolveu recentemente um sistema microrobítico com uma ampla gama de aplicações possíveis, que vão desde a conclusão de microcirurgias até a entrega de mercadorias a humanos. Este robô, apresentado em um artigo publicado em Nature Electronics , baseia-se em uma ideia apresentada pela mesma equipe de pesquisadores há quase uma década.
"Começamos a explorar a ideia de criar um minúsculo sistema microrobótico que é autopropulsado por um potente motor a jato e tem componentes microeletrônicos a bordo quase dez anos atrás, "Schmidt disse ao TechXplore." Nossa ideia inicial era construir um microssistema autopropulsor inteligente que pudesse interagir com células biológicas individuais, que são de tamanho semelhante ao próprio microssistema. Este sistema deve ser capaz de se mover, sinta seu ambiente, transporte de carga, distribuir medicamentos e realizar microcirurgias ”.
Desde que Schmidt e seus colegas introduziram pela primeira vez seu conceito de sistema microrobótico, sua equipe e várias outras em todo o mundo tentaram criar tecnologias semelhantes, principalmente in vitro (ou seja, usando placas de Petri). Implementando um sistema dentro do corpo humano, Contudo, provou ser muito mais desafiador. Na verdade, a fim de completar tarefas dentro do corpo, o sistema precisaria ser controlado de fora e as informações que ele coleta (por exemplo, dados de diagnóstico) devem ser facilmente transmitidas para o mundo externo (por exemplo, para médicos ou profissionais de saúde).
"Para um sistema microrobótico funcionar no corpo humano, deve conter energia elétrica, sensores, atuadores, antenas e circuitos microeletrônicos, "Schmidt explicou." O objetivo principal de nosso trabalho recente era dar um grande passo em direção a esse objetivo final (e reconhecidamente muito ambicioso); ainda de forma simplificada, claro."
Schmidt e seus colegas fabricaram seu microssistema flexível integrando componentes micro e nanoeletrônicos em uma superfície de chip, de forma semelhante à forma como a tecnologia de silício é usada para construir chips de computador. Uma diferença fundamental entre seu sistema e os chips de computador normais, Contudo, é que o design do primeiro inclui motores a jato criados usando uma abordagem pioneira há cerca de vinte anos, que não é normalmente usado no desenvolvimento da microeletrônica convencional.
"O truque consiste em colocar materiais finos altamente tensos no chip, que se encaixam (roll-up) em estruturas de microtubos em rolo suíço, quando eles são delaminados da superfície do chip, "Schmidt disse." Este procedimento pode ser bem controlado, de modo que os microtubos enrolados fiquem firmemente conectados em dois lados opostos ao sistema microrrobótico. Se esses microtubos forem revestidos com platina dentro, bolhas de oxigênio são geradas por uma reação catalítica, assim que a platina entrar em contato com solução aquosa contendo um pouco de peróxido de hidrogênio (H 2 O 2 ). "

Dr. Oliver G. Schmidt durante a realização de sua pesquisa. Crédito:Jacob Müller.
Como resultado da estratégia de design não convencional usada por Schmidt e seus colegas, quando o sistema microrobótico é colocado em uma solução aquosa contendo peróxido de hidrogênio (H 2 O 2 ) a solução entra em seus dois microtubos, gerando bolhas de oxigênio. Essas bolhas são então empurradas para fora das extremidades dos microtubos, acelerar o sistema por um mecanismo conhecido como propulsão a jato.
"Este princípio de propulsão a jato foi criado por nosso grupo há 12 anos, "Schmidt disse. No entanto, um motor bimotor como em nosso presente trabalho nunca foi construído antes. "
A reação catalítica no núcleo da estratégia de propulsão a jato dos pesquisadores pode ser controlada pela alteração da temperatura dos motores a jato. Uma alta temperatura resulta em mais bolhas e um impulso mais forte; uma temperatura baixa em menos bolhas e um impulso mais fraco.
Schmidt e seus colegas controlam a temperatura de um dos dois motores a jato aplicando uma corrente que passa por um elemento resistivo, que está conectado ao motor. Mudanças na temperatura aumentam a quantidade de bolhas geradas e o impulso subsequente em um dos motores a jato, o que, por sua vez, permite que o sistema faça curvas à direita ou à esquerda.
"Você pode se perguntar como fornecemos a corrente que aquece o elemento resistivo, "Schmidt disse." Para este propósito, integramos uma pequena antena ao microssistema que pode ser alimentada por energia sem fio de fora (semelhante ao carregamento indutivo sem fio do seu telefone celular). Portanto, a energia elétrica está a bordo e pode ser usada, o que é inteiramente novo para um micro-robô autopropelido tão pequeno. "
O minúsculo robô desenvolvido por Schmidt e seus colegas também tem um pequeno braço, o que lhe permite agarrar e soltar pequenos objetos em seu entorno. Quando a temperatura do sistema muda, o pequeno braço realiza ações diferentes, curvando-se para agarrar objetos (por exemplo, micro-pílulas) ou abaixando-se para liberá-los.
"Este braço robótico integrado também é um recurso totalmente novo para microssistemas autopropelidos, "Schmidt disse." Finalmente, o microrrobô pode ter um minúsculo LED infravermelho a bordo, que pode ser ligado pela energia transferida sem fio. Este LED pode ser útil para rastrear o microrrobô dentro do corpo. Ligar e desligar LEDs minúsculos em um microrrobô móvel nunca foi mostrado antes. "
O minúsculo sistema robótico desenvolvido por Schmidt e sua equipe é feito de um material altamente flexível. Isso significa que ele pode ser dobrado ou deformado sem quebrar, assim, ele pode até mesmo passar por minúsculos capilares ou outros pequenos canais no corpo humano e continuar a operar normalmente.
No futuro, este novo sistema pode ter várias aplicações valiosas. Por exemplo, poderia completar tarefas dentro do corpo humano que requerem um alto nível de precisão, incluindo procedimentos cirúrgicos ou diagnósticos.
"Demonstramos que a energia elétrica pode ser transferida sem fio para sistemas microrobóticos ultrapequenos e que essa energia pode ser usada para realizar tarefas úteis:dirigir o microrrobô remotamente ou ligar e desligar um LED infravermelho, "Schmidt disse." O próximo passo será rodar o sistema em fluidos biológicos, como o sangue. Para este propósito, os motores precisam ser construídos de uma maneira ligeiramente diferente. "
© 2020 Science X Network