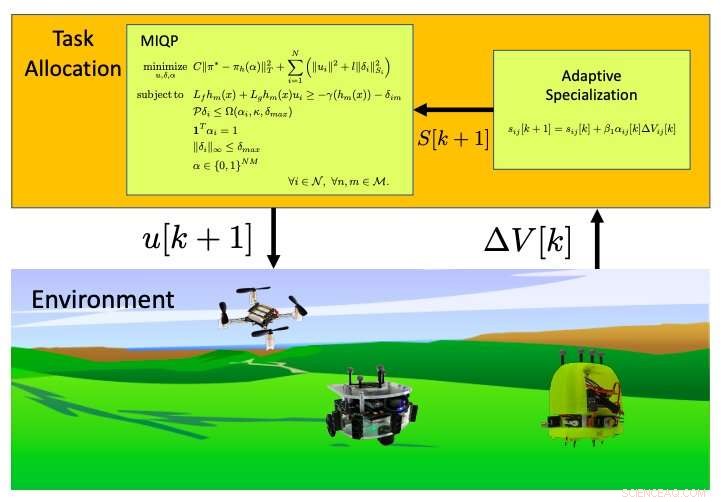
Uma figura que ilustra o ciclo de feedback proposto entre a estrutura de alocação de tarefas, o ambiente, e a atualização da especialização adaptativa. A eficácia dos robôs em cada tarefa é medida como ∆V [k], que é passado para a lei de atualização de especialização adaptativa. Uma vez que os novos parâmetros de especialização são calculados, a alocação de tarefas MIQP é resolvida e as entradas são enviadas para os robôs. Crédito:Emam et al.
Nos últimos anos, robôs se tornaram cada vez mais sofisticados, portanto, eles agora são capazes de completar uma ampla variedade de tarefas. Embora alguns robôs sejam projetados para trabalhar individualmente, por exemplo, fornecer assistência básica nas casas das pessoas, outros podem ser mais eficientes quando implantados em equipes.
Durante as missões de busca e resgate, por exemplo, após desastres naturais, robôs podem ser mais eficazes como uma equipe, pois eles poderiam entregar suprimentos ou procurar sobreviventes mais rapidamente, cobrindo regiões geográficas maiores. Para completar missões como uma equipe com mais eficiência, Contudo, os robôs devem ser capazes de cooperar bem e distribuir com eficácia diferentes tarefas entre si.
Com isso em mente, pesquisadores do Instituto de Tecnologia da Geórgia (Georgia Tech) desenvolveram recentemente uma estrutura para alocação adaptativa de tarefas durante missões que devem ser concluídas por uma equipe de robôs. Sua estrutura, apresentado em um artigo pré-publicado no arXiv, pode atribuir tarefas a robôs com base em suas capacidades e características exclusivas.
"As equipes de robôs são projetadas para operar em ambientes dinâmicos e este artigo propõe uma regra atualizada que permite aos robôs saber como eles se adaptam a cada uma das várias tarefas que lhes são atribuídas durante o voo, "Yousef A Emam, um dos pesquisadores que realizou o estudo, disse TechXplore.
O framework desenvolvido pelos pesquisadores é baseado em uma técnica de alocação de tarefas para sistemas multi-robôs heterogêneos que eles introduziram em um artigo anterior. Essa estratégia concebida anteriormente envolve o uso de um algoritmo que considera as diferenças nas capacidades individuais do robô e aloca as tarefas de acordo. A alocação e a execução dessas tarefas ocorrem simultaneamente.
"Nossa estrutura resolve problemas de otimização online, dizendo aos robôs individuais como priorizar suas contribuições para as várias tarefas que devem completar (ou seja, alocação de tarefas), e como fazer isso (ou seja, execução de tarefas), "Emam disse.
Em seu estudo, Emam e seus colegas desenvolveram a estratégia de alocação de tarefas que desenvolveram anteriormente, tornando-o mais responsivo às mudanças no ambiente ao redor dos robôs. Em contraste com sua versão anterior, sua nova estrutura não requer um modelo explícito do ambiente ou das capacidades do robô que são desconhecidas. Em vez de, considera principalmente o progresso coletivo que a equipe de robôs fez em uma determinada missão e o desempenho de cada robô em tarefas individuais.
"Em nosso estudo recente, desenvolvemos uma lei de feedback que torna a estrutura desenvolvida anteriormente adaptável a perturbações ambientais, "Emam explicou." Isso significa que mesmo que o robô não tenha um conhecimento perfeito de como ele é adequado para cada uma das tarefas, ele aprenderá na hora. "
Os pesquisadores avaliaram sua estrutura em uma série de simulações e descobriram que ela alcançou resultados altamente promissores. Nestes experimentos, sua abordagem permitiu a alocação eficaz de tarefas entre robôs sob uma variedade de condições ambientais, mesmo nos casos em que os recursos de robôs individuais eram desconhecidos antes de sua implantação.
No futuro, a estrutura de alocação e execução de tarefas desenvolvida por Emam e seus colegas poderia aprimorar a cooperação entre robôs que são implantados como uma equipe, melhorando seu desempenho coletivo. Isso poderia facilitar a mobilização em grande escala de robôs durante as missões de busca e resgate.
"Atualmente, estamos trabalhando para estender a estrutura para incluir os recursos de cada robô (por exemplo, sensores, atuadores), para que possamos modelar falhas de recursos online de forma mais explícita, "Emam disse." Além disso, outro aspecto que estamos examinando é a distribuição da computação entre os robôs (descentralizada). "
© 2020 Science X Network














