Pedestres, o robô bípede desenvolvido pelos pesquisadores, atravessar a rua ao lado de um usuário humano. Crédito:Ahmad et al.
Os humanos geralmente são capazes de adaptar seu estilo de caminhada com base no ambiente em que estão se movendo, por exemplo, acelerando se a consistência do solo abaixo de seus pés permitir, diminuindo a velocidade quando o chão está escorregadio, mudar de direção para evitar poças ou buracos no solo, e assim por diante. Para navegar em uma variedade de ambientes, os robôs devem ser capazes de adaptar seu comportamento de caminhada de maneira semelhante, ajustando sua estrutura em resposta às mudanças ambientais.
Com isso em mente, Pesquisadores da Universidade de Osaka, no Japão, criaram recentemente o PedestriANS, um robô bípede que pode mudar algumas das características físicas e movimentos de suas pernas em resposta às mudanças no ambiente circundante. Este novo robô, apresentado em um artigo publicado na revista SAGE Comportamento Adaptativo , pode mudar seu estilo de andar usando um sistema simples que conecta os movimentos e a configuração de suas duas pernas.
"O principal objetivo do nosso trabalho é desenvolver robôs robustos que possam lidar com distúrbios; robôs que possam acompanhar humanos e caminhar com eficácia em terrenos planos e irregulares, como grama e cascalho, "Huthaifa Ahmad, um dos pesquisadores que realizou o estudo, disse TechXplore. “Para alcançar este objetivo, precisamos desenvolver sistemas robóticos com uma morfologia adaptativa; porque mesmo com os robôs bípedes mais avançados disponíveis atualmente, ter um modelo preciso do corpo do robô e do ambiente é crucial para que eles funcionem corretamente. "
Pedestres, o robô desenvolvido por Ahmad e seus colegas, depende de um sistema de rede de atuador (ANS), um conceito de design introduzido em seus trabalhos anteriores. Em seus estudos anteriores, os pesquisadores incorporaram o mesmo conceito em várias outras aplicações, incluindo espinhas robóticas, braços e robôs multi-pernas.
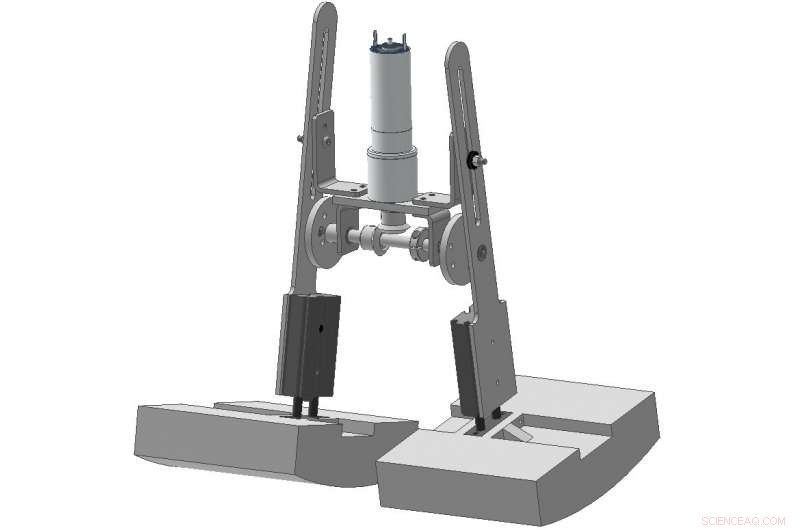
Uma ilustração de pedestres. Crédito:Ahmad et al.
“Como sua viabilidade foi demonstrada em vários estudos, Atualmente, estou usando o princípio ANS em minha pesquisa para obter robôs adaptáveis, ao utilizar as diferentes interações entre os atuadores montados em seus corpos, "Ahmad disse.
Os movimentos do robô desenvolvido por Ahmad e seus colegas são produzidos por um único motor, e suas pernas estão conectadas por meio de um ANS. Ao contrário de outros robôs bípedes baseados em sistemas complexos, O PedestriANS tem uma estrutura bastante simples. O robô se adapta às mudanças em seu ambiente circundante, explorando as características físicas de suas pernas e as interações entre seus diferentes componentes, resultando em uma variedade de comportamentos de caminhada diferentes.
“O comportamento de caminhada do robô muda ao alterar a interação entre os atuadores do ANS, "Disse Ahmad." Para produzir um comportamento melhor, as demandas do robô para um determinado padrão de conexão diferem com base na situação dada. Nosso trabalho sugere que a melhor maneira de realizar robôs auto-adaptáveis é permitindo que eles ajustem suas morfologias e explorem sua dinâmica de corpo inteiro em resposta às mudanças ambientais "

Pedestres, o robô bípede desenvolvido pelos pesquisadores. Crédito:Ahmad et al.
Os pesquisadores avaliaram o desempenho de seu robô em uma série de experimentos. Em primeiro lugar, eles testaram como as mudanças na morfologia do robô impactaram seu comportamento de andar, observando sua capacidade de se adaptar a diferentes materiais do solo, focando nas mudanças em seu estilo de caminhar, estabilidade, Rapidez, e a direção em que se moveu.
Depois de analisar os resultados obtidos neste primeiro experimento, Ahmad e seus colegas atualizaram o design do robô de uma forma que permitiu que ele alternasse automaticamente entre diferentes padrões de conexão entre suas pernas. Eles então conduziram uma segunda avaliação e encontraram melhorias significativas em como o robô ajustou sua morfologia durante a locomoção. Neste segundo experimento, Os pedestres produziram estilos de caminhada adaptáveis em resposta ao ambiente em que estavam operando.
No futuro, o robô desenvolvido por esta equipe de pesquisadores pode ser usado para completar tarefas que envolvem a movimentação em ambientes descontrolados e em constante mudança. Enquanto os pedestres podem mudar o tipo de interação entre suas pernas para produzir diferentes comportamentos de locomoção que melhor se adaptam ao seu ambiente, ele ainda não consegue identificar autonomamente os ajustes morfológicos mais adequados a situações específicas. Os pesquisadores planejam continuar trabalhando no robô para habilitar este importante recurso, o que é necessário para que o robô opere sem entrada e orientação humana contínua.
"O próximo passo em nossa pesquisa será criar um sistema de controle que permita ao robô continuar fornecendo o melhor desempenho durante todas as fases de locomoção, selecionar de forma autônoma um padrão de conexão adequado, "Ahmad disse." Além disso, estendendo o ANS para incluir mais partes do robô (por exemplo, tronco), isso aumentará as possíveis mudanças morfológicas, o que por sua vez reflete na adaptabilidade do robô. "
© 2020 Science X Network