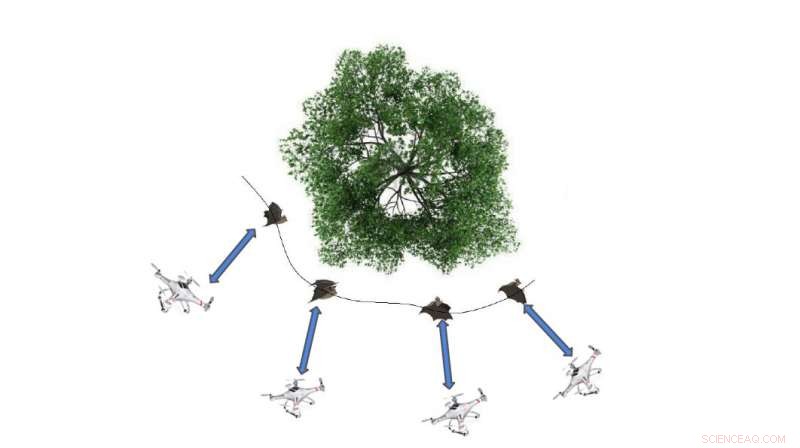
Um UAV de quatro rotores navegando por uma árvore, imitando o comportamento do morcego. Crédito:Tanveer et al.
Nos últimos anos, pesquisadores em todo o mundo têm tentado desenvolver técnicas computacionais que reproduzam o comportamento de humanos ou animais em robôs e máquinas. Isso inclui, por exemplo, a estrutura e funcionamento do cérebro humano, a habilidade de comunicação do enxame das abelhas, os estilos de locomoção de espécies específicas de peixes ou anfíbios, e muito mais.
Com base nas realizações de estudos anteriores, pesquisadores da Virginia Tech e da Universidade de Maryland recentemente introduziram uma estrutura de simulação que poderia ser usada para recriar o comportamento do morcego em UAVs de quatro rotores. Este modelo, apresentado em um artigo pré-publicado no arXiv, nasceu de uma colaboração entre Rolf Müller, um especialista em detecção de biosonar, estatísticos Xiaowei Wu e Hongxiao Zhu, e o cientista da computação Pratap Tokekar, financiado pela National Science Foundation (NSF).
"Nossa ideia geral era construir UAVs que pudessem recriar o comportamento de um morcego durante a navegação no complexo, ambientes naturais, "Zhu disse à TechXplore." Neste estudo específico, nosso principal objetivo era construir uma estrutura computacional para simular os ambientes de detecção de morcegos e produzir sinais de biosonar simulados para fins de treinamento e teste. "
O framework de simulação desenvolvido por Zhu e seus colegas consiste em um modelo para simular a geometria de florestas aleatórias com árvores e um modelo que gera sinais de biosonar. Os sinais do biosonar são sons curtos produzidos por morcegos e outros animais, incluindo baleias e golfinhos. Esses sons geram ecos que contêm informações valiosas sobre o ambiente circundante, auxiliando os animais em sua navegação, bem como em seus esforços de caça e coleta.
O primeiro componente da nova estrutura é um modelo que fornece informações detalhadas sobre ambientes aleatórios. O segundo componente imita os mecanismos biológicos que permitem a navegação guiada por biosonar em morcegos, produzindo ecos simulados que contêm informações sobre os arredores do robô.
A abordagem de simulação desenvolvida por Zhu e seus colegas tem vários recursos e vantagens exclusivos. Um dos mais notáveis é que permite que simulações aleatórias sejam executadas repetidamente, assim, pode produzir dados sensoriais ricos que seriam mais difíceis de coletar usando abordagens experimentais mais tradicionais.
"Os principais sucessos da robótica até agora têm sido limitados, ambientes estruturados, como armazéns e ambientes industriais, "Tokekar, co-investigador do estudo, disse TechXplore. “Há muito interesse em usar VANTs em ambientes não estruturados, como florestas e áreas densamente vegetadas. Só para citar dois exemplos:a DARPA concluiu recentemente seu Fast, Leve, Programa de autonomia, Onde, como o mesmo sugere, a ênfase estava em UAVs ágeis operando em ambientes florestais, enquanto o Laboratório de Pesquisa do Exército anunciou um novo programa chamado SARA com um objetivo muito semelhante em mente. "
De acordo com Tokekar, a natureza oferece inúmeros exemplos de comportamentos que, se replicado artificialmente, pode ser extremamente útil em aplicações de robótica. As habilidades de navegação assistida por biosonar observadas em morcegos, em que seu estudo se concentra, poderia ajudar especificamente a melhorar a navegação e a detecção de objetos em robôs voadores.
No futuro, a plataforma de simulação desenvolvida por Zhu, Tokekar e seus colegas poderiam ser usados para replicar este comportamento particular do morcego em UAVs autônomos de quatro rotores. Além disso, poderia ajudar os pesquisadores a avaliar e comparar diferentes algoritmos de navegação inspirados em morcegos em ambientes simulados.
"O aspecto mais significativo do nosso trabalho é que ele fornece uma plataforma conveniente para o treinamento e teste de algoritmos robóticos bioinspirados para UAVs, "Zhu disse." Em nossos próximos estudos, planejamos treinar e testar algoritmos robóticos para diferentes tarefas de navegação usando os dados do Biosonar gerados nesta estrutura. "
© 2020 Science X Network