Crédito:Tan et al.
Robôs auto-reconfiguráveis (SRRs) que podem mudar automaticamente de forma e se adaptar ao ambiente circundante recentemente atraíram muito interesse na comunidade de pesquisa em robótica. Esses robôs podem ter várias aplicações úteis, pois podem adquirir um alto nível de autonomia para sentir o ambiente ao seu redor, bem como no planejamento e execução de ações adequadas. Embora estudos anteriores tenham introduzido métodos para classificar esses robôs em subgrupos, ainda não existe um procedimento padrão para avaliar seu desempenho.
Com isso em mente, pesquisadores da Sun Yat-sen University na China e da Singapore University of Technology and Design desenvolveram recentemente uma estrutura para a taxonomia e avaliação (TAEV) de robôs auto-reconfiguráveis. Seu estudo, apresentado em Acesso IEEE , foi financiado pelo Escritório do Programa Nacional de P&D de Robótica de Cingapura.
"Até aqui, pesquisadores desenvolveram uma abordagem qualitativa para classificar SRRs, mas não métodos quantitativos que podem orientar o designer, fabricante e usuário de robô, "Abdullah Aamir Hayat, um dos pesquisadores que realizou o estudo, disse TechXplore. "Isso nos motivou a desenvolver uma estrutura e um método de avaliação para SRRs."
Em SRRs, a capacidade de mudar de forma para completar uma determinada tarefa depende principalmente do tipo de mecanismo empregado pelos robôs e de seu nível de autonomia. Embora alguns sistemas SRR sejam totalmente autônomos, outros requerem algum grau de teleoperação manual.
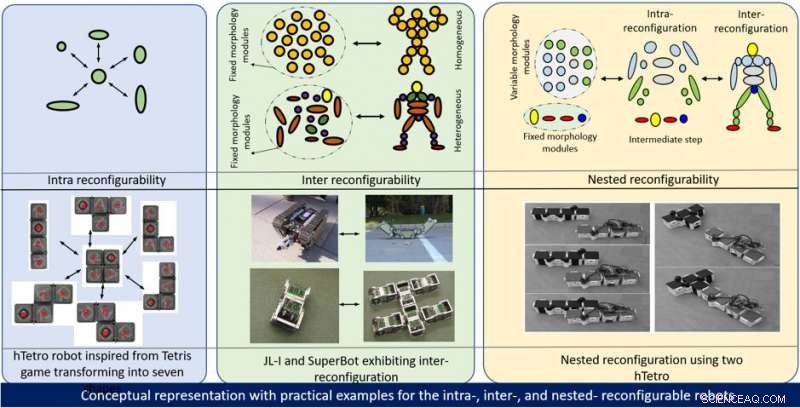
Em um nível mecânico, os robôs podem ser classificados em três categorias principais:aqueles com um intra-, inter-, e reconfiguração aninhada. A diferença entre intra e interconfigurações está no número de configurações disponíveis para o robô e na escala dessas configurações.
A distinção entre reconfigurabilidade intra e interconfigurabilidade é que a primeira envolve um único módulo robótico que pode alterar sua morfologia sem qualquer montagem ou desmontagem e a última envolve dois ou mais módulos que podem ser montados ou desmontados. Integrar o inter e o intra produz a reconfigurabilidade aninhada. Crédito:Tan et al.
A intra-reconfigurabilidade envolve um único módulo robótico que pode alterar sua morfologia sem qualquer montagem ou desmontagem, enquanto a inter-reconfigurabilidade envolve dois ou mais módulos que podem ser montados ou desmontados. Finalmente, reconfiguração aninhada, cunhado pelo Prof. Mohan Rajesh Elara e Prof. Kristin L. Wood, combina recursos de reconfigurações intra e inter.
Em seu jornal, Hayat e seus colegas introduziram métricas que podem ser usadas para avaliar SRRs, quantificando seu nível de autonomia e o número de configurações disponíveis para eles. Essas métricas foram combinadas para criar uma estrutura TAEV que poderia orientar pesquisadores e fabricantes na avaliação de seus sistemas robóticos.
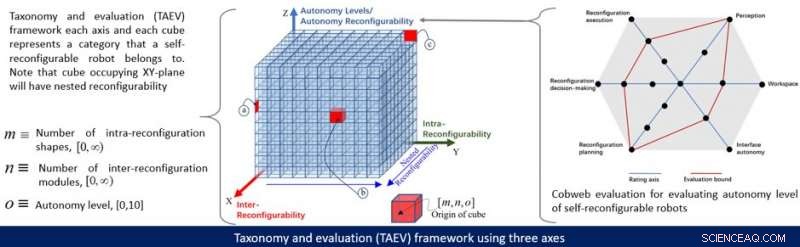
"Nosso trabalho quantifica a reconfigurabilidade do mecanismo, atribuindo um índice com base em uma série de morfologia de significado e o número de módulos envolvidos, "Hayat explicou." Esses índices são representados nos dois eixos (X- e Y-) no quadro de três eixos. O terceiro eixo (Z-) é atribuído com o índice dado pelo nível de autonomia que é calculado usando o modelo de avaliação de teia de aranha que consiste em seis indicadores de desempenho, a saber, planejamento de reconfiguração, tomando uma decisão, autonomia da interface, percepção, e espaço de trabalho. "
A principal vantagem da estrutura desenvolvida por Hayat e seus colegas é que ela aloca um índice exclusivo para um determinado SRR dentro do espaço de taxonomia 3-D que eles delinearam em seu artigo. Como resultado, pode ser usado para projetar estudos de compensação e desenvolver abordagens para avaliar ou comparar o desempenho de diferentes SRRs na mesma tarefa.
"A estrutura genérica que apresentamos pode ser aplicada a vários SRRs existentes, permitindo que eles sejam classificados não apenas qualitativamente com base em seu tamanho, locomoção, etc., mas também quantitativamente, incorporando o mecanismo e a autonomia dos robôs, "Hayat disse.
No futuro, esta estrutura para TAEV poderia ajudar a avaliar SRRs de forma mais eficaz, ao mesmo tempo que identifica suas limitações e recursos que podem ser melhorados. Pesquisadores e fabricantes podem usá-lo para comparar o desempenho de robôs diferentes nas mesmas tarefas ou para avaliar versões diferentes do mesmo robô. Em seu jornal, Hayat e seus colegas também discutem outras aplicações potenciais para a nova estrutura, usando robôs existentes como exemplos.
"Nossas descobertas sugerem que há um enorme potencial para novos projetos de robôs com autonomia para ocupar o espaço tridimensional e que arquiteturas reconfiguráveis aninhadas podem ter muitas aplicações práticas, "Hayat disse." Com isso em mente, nosso grupo está trabalhando na implementação de um novo sistema intra-, inter-, e arquiteturas robóticas aninhadas reconfiguráveis para realizar tarefas de manutenção, nomeadamente limpeza e vigilância autónomas. "
© 2020 Science X Network