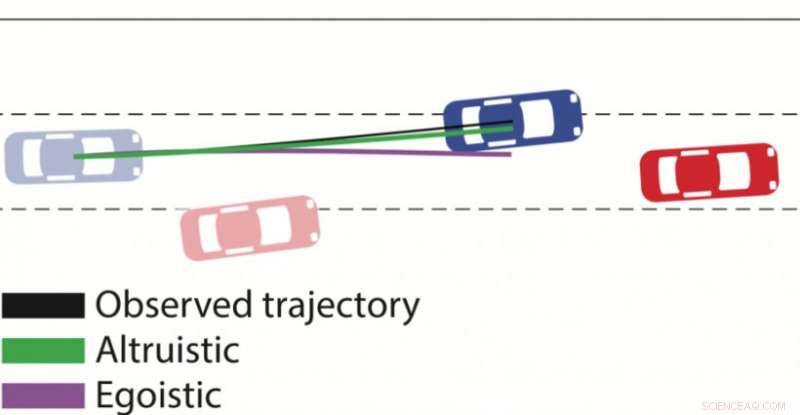
Em cenários de mesclagem de faixa, um sistema desenvolvido no MIT poderia distinguir entre o comportamento de direção altruísta e egoísta. Crédito:Massachusetts Institute of Technology
Carros autônomos estão chegando. Mas, apesar de todos os seus sensores sofisticados e habilidades intrincadas de processamento de dados, até os carros mais modernos carecem de algo que (quase) todo jovem de 16 anos com carteira de estudante tem:consciência social.
Embora as tecnologias autônomas tenham melhorado substancialmente, eles ainda veem os motoristas ao seu redor como obstáculos compostos de uns e zeros, em vez de seres humanos com intenções específicas, motivações, e personalidades.
Mas, recentemente, uma equipe liderada por pesquisadores do Laboratório de Ciência da Computação e Inteligência Artificial do MIT (CSAIL) tem explorado se os carros autônomos podem ser programados para classificar as personalidades sociais de outros motoristas, para que possam prever melhor o que os diferentes carros farão - e, Portanto, ser capaz de dirigir com mais segurança entre eles.
Em um novo jornal, os cientistas integraram ferramentas da psicologia social para classificar o comportamento ao dirigir em relação ao quão egoísta ou altruísta é um determinado motorista.
Especificamente, eles usaram algo chamado orientação para o valor social (SVO), que representa o grau em que alguém é egoísta ("egoísta") versus altruísta ou cooperativo ("pró-social"). O sistema então estima SVOs dos motoristas para criar trajetórias de direção em tempo real para carros autônomos.
Testando seu algoritmo nas tarefas de mesclar faixas e fazer curvas à esquerda desprotegidas, a equipe mostrou que eles podiam prever melhor o comportamento de outros carros por um fator de 25 por cento. Por exemplo, nas simulações da curva à esquerda, seu carro sabia que esperar quando o carro que se aproximava tinha um motorista mais egoísta, e então fazer a volta quando o outro carro fosse mais pró-social.
Embora ainda não seja robusto o suficiente para ser implementado em estradas reais, o sistema pode ter alguns casos de uso intrigantes, e não apenas para os carros que se dirigem. Digamos que você seja um humano dirigindo e um carro de repente entre em seu ponto cego - o sistema pode lhe dar um aviso no espelho retrovisor de que o carro está com um motorista agressivo, permitindo que você se ajuste de acordo. Também poderia permitir que os carros que dirigem sozinhos realmente aprendam a exibir um comportamento mais semelhante ao humano, que será mais fácil para os motoristas humanos entenderem.
"Trabalhar com e ao redor de humanos significa descobrir suas intenções para entender melhor seu comportamento, "diz o estudante de graduação Wilko Schwarting, quem foi o autor principal do novo artigo que será publicado esta semana na última edição da Proceedings of the National Academy of Sciences . "As tendências das pessoas para serem colaborativas ou competitivas muitas vezes se refletem em como elas se comportam como motivadoras. Neste artigo, procuramos entender se isso era algo que pudéssemos realmente quantificar. "
Os co-autores de Schwarting incluem os professores do MIT, Sertac Karaman e Daniela Rus, bem como a cientista pesquisadora Alyssa Pierson e o ex-pós-doutorado do CSAIL Javier Alonso-Mora.
Uma questão central com os carros autônomos de hoje é que eles são programados para assumir que todos os humanos agem da mesma maneira. Isso significa que, entre outras coisas, eles são bastante conservadores em sua tomada de decisão em paradas de quatro vias e outros cruzamentos.
Embora esse cuidado reduza a chance de acidentes fatais, também cria gargalos que podem ser frustrantes para outros motoristas, para não dizer difícil para eles entenderem. (Pode ser por isso que a maioria dos incidentes de tráfego envolveu a retaguarda por motoristas impacientes.)
“Criar um comportamento mais humano em veículos autônomos (AVs) é fundamental para a segurança dos passageiros e dos veículos ao redor, uma vez que se comportar de uma maneira previsível permite que os humanos entendam e respondam adequadamente às ações do antivírus, "diz Schwarting.
Para tentar expandir a consciência social do carro, a equipe CSAIL combinou métodos da psicologia social com a teoria dos jogos, um referencial teórico para conceber situações sociais entre jogadores concorrentes.
A equipe modelou cenários de estradas onde cada motorista tentava maximizar sua própria utilidade e analisava suas "melhores respostas" dadas as decisões de todos os outros agentes. Com base naquele pequeno trecho de movimento de outros carros, o algoritmo da equipe poderia então prever o comportamento dos carros ao redor como cooperativo, altruísta, ou egoísta - agrupando os dois primeiros como "pró-sociais". As pontuações das pessoas para essas qualidades baseiam-se em um continuum no que diz respeito a quanto uma pessoa demonstra cuidado consigo mesma versus cuidado com os outros.
Nos cenários de fusão e conversão à esquerda, as duas opções de resultado eram deixar alguém entrar na sua via ("pró-social") ou não ("egoísta"). Os resultados da equipe mostraram que, não surpreendentemente, carros em fusão são considerados mais competitivos do que carros em não fusão.
O sistema foi treinado para tentar entender melhor quando é apropriado exibir diferentes comportamentos. Por exemplo, até o mais respeitoso dos motoristas humanos sabe que certos tipos de ações - como fazer uma mudança de faixa no trânsito intenso - exigem um momento para ser mais assertivo e decisivo.
Para a próxima fase da pesquisa, a equipe planeja trabalhar para aplicar seu modelo aos pedestres, bicicletas, e outros agentes em ambientes de condução. Além disso, eles estarão investigando outros sistemas robóticos que atuam entre os humanos, como robôs domésticos, e integração do SVO em seus algoritmos de previsão e tomada de decisão. Pierson diz que a capacidade de estimar as distribuições SVO diretamente do movimento observado, em vez de em condições de laboratório, será importante para campos muito além da direção autônoma.
"Ao modelar personalidades motrizes e incorporar os modelos matematicamente usando o SVO no módulo de tomada de decisão de um carro robô, este trabalho abre a porta para um compartilhamento de estradas mais seguro e contínuo entre carros movidos por humanos e carros movidos por robôs, "diz Rus.
Esta história foi republicada por cortesia do MIT News (web.mit.edu/newsoffice/), um site popular que cobre notícias sobre pesquisas do MIT, inovação e ensino.