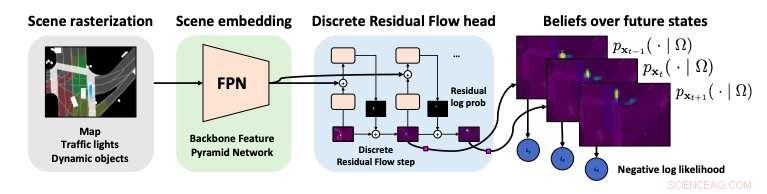
Visão geral da rede de fluxo residual discreto. Crédito:Jain et al.
Em anos que virão, os veículos autônomos poderiam gradualmente se tornar um meio de transporte popular. Antes que isso aconteça, Contudo, os pesquisadores precisarão desenvolver ferramentas que garantam que esses veículos sejam seguros e possam navegar com eficiência em ambientes povoados por humanos.
Como os veículos autônomos são projetados para contornar obstáculos estáticos e móveis, eles devem ser capazes de detectar objetos rapidamente e evitá-los. Uma maneira de conseguir isso poderia ser desenvolver modelos que possam prever o comportamento futuro de objetos ou pessoas na rua, para estimar onde eles estarão localizados quando o veículo se aproximar deles.
Prevendo mudanças futuras em ambientes urbanos, Contudo, pode ser muito desafiador. É especialmente difícil quando se trata de prever o comportamento humano, como movimentos ou ações inesperadas de pedestres.
Ano passado, um dos carros autônomos do Uber matou Elaine Herzberg, uma mulher de 49 anos, no Arizona. Este acidente, junto com dezenas de outros, gerou muito debate sobre a segurança dos veículos autônomos, bem como sobre se esses veículos devem ser testados em ambientes populosos.
Cerca de uma semana atrás, novos documentos divulgados pelo Conselho Nacional de Segurança de Transporte dos EUA (NTSB) revelaram que o veículo autônomo do Uber envolvido no acidente fatal do ano passado não identificou Herzberg como um pedestre até que fosse tarde demais. Os mesmos relatórios sugerem que o veículo autônomo envolvido no acidente nunca foi treinado para detectar pedestres em qualquer lugar fora da faixa de pedestres.
Herzberg estava em trânsito na hora do acidente, portanto, as falhas de software reveladas pelo relatório do NTSB explicariam por que o veículo autônomo do Uber não conseguiu localizá-la, o que acabou por causar sua morte. As novas análises divulgadas pelo NTSB podem interromper o programa de veículos autônomos da empresa, que começou a testar novamente em dezembro de 2018, depois de ter ficado em espera por vários meses.
Essas novas descobertas destacam a necessidade de desenvolver IA mais avançada e um software mais confiável antes que os veículos autônomos possam ser testados em estradas reais. Interessantemente, alguns dias antes do NTSB divulgar esses documentos, um artigo de pesquisadores do Uber's Advanced Technologies Group, a Universidade de Toronto e UC Berkeley foi pré-publicado no arXiv, introdução de uma nova técnica para prever o comportamento de pedestres chamada rede de fluxo residual discreto (DRF-NET). De acordo com os pesquisadores, esta rede neural pode fazer previsões sobre o comportamento futuro dos pedestres enquanto captura a incerteza inerente na previsão de movimentos de longo alcance.
"Nossa rede aprendida captura efetivamente posteriores multimodais sobre o movimento humano futuro, prevendo e atualizando e distribuição discretizada em localizações espaciais, "escreveram os pesquisadores em seu artigo.
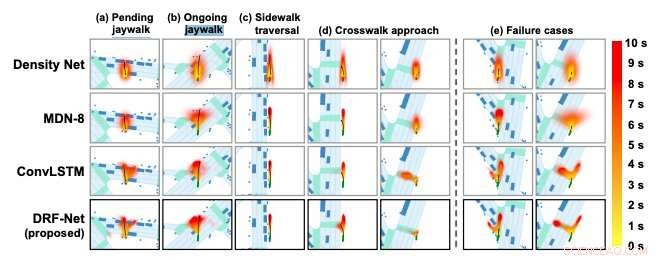
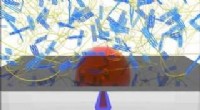
Uma das figuras no artigo recente mostrando as previsões de pedestres da modelo. Crédito:Jain et al.
Os pesquisadores expressaram crenças sobre as posições futuras dos pedestres por meio de distribuições categóricas que representam o espaço. Eles então usaram essas distribuições para planejar e otimizar caminhos para veículos autônomos, que levam em consideração as posições esperadas dos pedestres.
Em primeiro lugar, a rede DTF-NET introduzida em seu papel rasteriza imagens de mapas de estradas, o que significa que ele os converte em uma imagem composta de pixels discretos. Os comportamentos dos pedestres são, portanto, codificados em uma imagem rasterizada de visão panorâmica, que está alinhado com um mapa semântico detalhado.
Subseqüentemente, a rede extrai recursos que são particularmente úteis para prever o comportamento dos pedestres a partir das imagens rasterizadas. Finalmente, os pesquisadores treinaram seu modelo para prever o comportamento futuro dos pedestres na estrada com base nessas características.
Eles treinaram e avaliaram sua rede neural usando um conjunto de dados em grande escala que compilou anteriormente, que contém gravações do mundo real com anotações de objetos e trilhas baseadas em detecção online, coletados em várias cidades da América do Norte. Essas gravações incluem trajetórias de pedestres que foram anotadas manualmente pelos pesquisadores em 360 graus, Visão de alcance de 120 metros usando um sensor LiDAR no veículo.
Nas avaliações realizadas pelos pesquisadores, a técnica DTF-NET teve um bom desempenho, superando vários outros métodos de linha de base para prever o comportamento de pedestres. Este método poderia, portanto, potencialmente ajudar a melhorar o desempenho dos veículos autônomos do Uber, permitindo-lhes antecipar os movimentos dos pedestres e planejar seus caminhos de acordo.
"The strong performance of DRF-NET's discrete predictions is very promising for cost-based and constrained robotic planning, "escreveram os pesquisadores.
Interessantemente, the pedestrian behaviors processed and predicted by the DTF-NET network, highlighted in one of the recent paper's figures, include 'pending jaywalk, ' 'ongoing jaywalk' and 'sidewalk traversal, ' as well as crosswalk. This seems somewhat ironic, as among other things, the recent documents released by NTSB highlighted the inability of Uber's self-driving vehicle to detect jaywalking pedestrians at the time of the crash in Arizona.
Only time will tell whether the DRF-NET network or other techniques will actually be able to improve the ability of self-driving vehicles to detect pedestrians. Por enquanto, Contudo, one thing seems clear:Significant advancements in AI and better techniques for detecting pedestrians will be necessary before self-driving vehicles can be safely put on the road.
© 2019 Science X Network