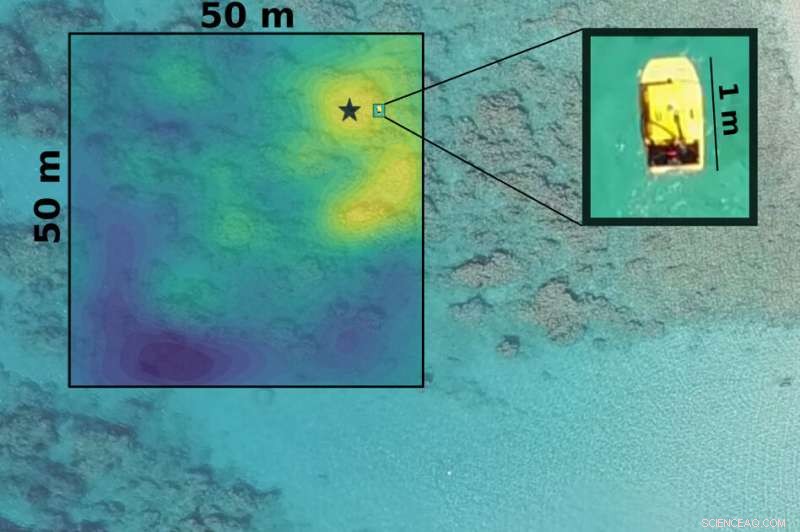
Mesmo em águas inexploradas, um sistema robótico desenvolvido pelo MIT pode farejar valiosos com eficiência, locais difíceis de encontrar para coletar amostras. Quando implementado em barcos autônomos implantados na costa de Barbados (foto), o sistema encontrou rapidamente a cabeça de coral mais exposta - o que significa que estava localizada no local mais raso - o que é útil para estudar como a exposição ao sol afeta os organismos de coral. Crédito:Massachusetts Institute of Technology
Um sistema robótico autônomo inventado por pesquisadores do MIT e do Woods Hole Oceanographic Institution (WHOI) detecta com eficiência os pontos de amostragem mais cientificamente interessantes - mas difíceis de encontrar - em vastos, águas inexploradas.
Os cientistas ambientais estão frequentemente interessados em coletar amostras nos locais mais interessantes, ou "maxima, "em um ambiente. Um exemplo poderia ser uma fonte de vazamento de produtos químicos, onde a concentração é a mais alta e praticamente não prejudicada por fatores externos. Mas um máximo pode ser qualquer valor quantificável que os pesquisadores desejam medir, como a profundidade da água ou partes do recife de coral mais expostas ao ar.
Os esforços para implantar robôs que buscam o máximo sofrem com problemas de eficiência e precisão. Normalmente, robôs se movem para frente e para trás como cortadores de grama para cobrir uma área, que consome muito tempo e coleta muitas amostras desinteressantes. Alguns robôs detectam e seguem trilhas de alta concentração até sua fonte de vazamento. Mas eles podem ser enganados. Por exemplo, produtos químicos podem ficar presos e se acumular em fendas longe de uma fonte. Os robôs podem identificar esses pontos de alta concentração como a origem, mas não estão nem perto.
Em um artigo apresentado na Conferência Internacional sobre Robôs e Sistemas Inteligentes (IROS), os pesquisadores descrevem "PLUMES, "um sistema que permite que robôs móveis autônomos se concentrem em um máximo com muito mais rapidez e eficiência. O PLUMES utiliza técnicas probabilísticas para prever quais caminhos têm probabilidade de levar ao máximo, enquanto navega pelos obstáculos, mudanças nas correntes, e outras variáveis. À medida que coleta amostras, pesa o que é aprendido para determinar se deve continuar por um caminho promissor ou pesquisar o desconhecido - que pode abrigar amostras mais valiosas.
Mais importante, PLUMES chega ao seu destino sem nunca ficar preso nesses locais complicados de alta concentração. "Isso é importante, porque é fácil pensar que você encontrou ouro, mas realmente você encontrou ouro de tolo, "diz a co-autora Victoria Preston, um Ph.D. Aluno do Laboratório de Ciência da Computação e Inteligência Artificial (CSAIL) e do Programa Conjunto MIT-WHOI.
Os pesquisadores construíram um barco robótico movido a PLUMES que detectou com sucesso a cabeça de coral mais exposta no recife Bellairs Fringing em Barbados, ou seja, estava localizado no local mais raso - o que é útil para estudar como a exposição ao sol afeta os organismos de coral. Em 100 testes simulados em diversos ambientes subaquáticos, um robô PLUMES virtual também coletou de forma consistente sete a oito vezes mais amostras de máximos do que os métodos tradicionais de cobertura em intervalos de tempo atribuídos.
"PLUMES faz a quantidade mínima de exploração necessária para encontrar o máximo e então se concentra rapidamente na coleta de amostras valiosas lá, "diz a co-autora Genevieve Flaspohler, um Ph.D. estudante e no CSAIL e no Programa Conjunto MIT-WHOI.
Se juntando a Preston e Flaspohler no papel estão:Anna P.M. Michel e Yogesh Girdhar, ambos cientistas do Departamento de Física e Engenharia Aplicada aos Oceanos do WHOI; e Nicholas Roy, professor do CSAIL e do Departamento de Aeronáutica e Astronáutica.
Navegando em uma compensação explorar-explorar
Um insight importante do PLUMES foi usar técnicas de probabilidade a raciocínio sobre como navegar no tradeoff notoriamente complexo entre explorar o que foi aprendido sobre o meio ambiente e explorar áreas desconhecidas que podem ser mais valiosas.
"O maior desafio na busca máxima é permitir que o robô equilibre a exploração de informações de lugares que ele já conhece como tendo altas concentrações e explorando lugares sobre os quais não conhece muito, "Flaspohler diz." Se o robô explorar muito, ele não coletará amostras valiosas suficientes no máximo. Se não explorar o suficiente, pode perder totalmente o máximo. "
Caiu em um novo ambiente, um robô movido a PLUMES usa um modelo estatístico probabilístico chamado de processo Gaussiano para fazer previsões sobre variáveis ambientais, como concentrações químicas, e estimar as incertezas do sensoriamento. PLUMES então gera uma distribuição de possíveis caminhos que o robô pode tomar, e usa os valores estimados e as incertezas para classificar cada caminho de acordo com o quão bem ele permite ao robô explorar e explorar.
Inicialmente, PLUMES escolherá caminhos que exploram aleatoriamente o ambiente. Cada amostra, Contudo, fornece novas informações sobre os valores desejados no ambiente circundante - como pontos com maiores concentrações de produtos químicos ou profundidades mais rasas. O modelo de processo gaussiano explora esses dados para restringir os caminhos possíveis que o robô pode seguir de sua posição dada para amostrar de locais com valor ainda mais alto. O PLUMES usa uma nova função objetivo - comumente usada no aprendizado de máquina para maximizar uma recompensa - para decidir se o robô deve explorar o conhecimento anterior ou explorar a nova área.
Caminhos "alucinantes"
A decisão de onde coletar a próxima amostra depende da capacidade do sistema de "alucinar" todas as ações futuras possíveis de sua localização atual. Para fazer isso, ele aproveita uma versão modificada do Monte Carlo Tree Search (MCTS), uma técnica de planejamento de caminhos popularizada para alimentar sistemas de inteligência artificial que dominam jogos complexos, como Go and Chess.
MCTS usa uma árvore de decisão - um mapa de nós e linhas conectados - para simular um caminho, ou sequência de movimentos, necessários para chegar a uma ação vencedora final. Mas em jogos, o espaço para caminhos possíveis é finito. Em ambientes desconhecidos, com dinâmica de mudança em tempo real, o espaço é efetivamente infinito, tornando o planejamento extremamente difícil. Os pesquisadores projetaram "MCTS de observação contínua, "que alavanca o processo gaussiano e a nova função objetivo para pesquisar este espaço pesado de caminhos reais possíveis.
A raiz desta árvore de decisão MCTS começa com um nó de "crença", que é a próxima etapa imediata que o robô pode dar. Este nó contém todo o histórico das ações e observações do robô até aquele ponto. Então, o sistema expande a árvore da raiz para novas linhas e nós, olhando várias etapas de ações futuras que levam a áreas exploradas e inexploradas.
Então, o sistema simula o que aconteceria se tomasse uma amostra de cada um desses nós recém-gerados, com base em alguns padrões que aprendeu com observações anteriores. Dependendo do valor do nó simulado final, todo o caminho recebe uma pontuação de recompensa, com valores mais altos igualando ações mais promissoras. As pontuações de recompensa de todos os caminhos são revertidas para o nó raiz. O robô seleciona o caminho de maior pontuação, dá um passo, e coleta uma amostra real. Então, ele usa os dados reais para atualizar seu modelo de processo gaussiano e repete o processo de "alucinação".
"Enquanto o sistema continuar a alucinar que pode haver um valor mais alto em partes invisíveis do mundo, deve continuar explorando, "Flaspohler diz." Quando finalmente converge para um ponto que estima ser o máximo, porque não pode alucinar um valor mais alto ao longo do caminho, em seguida, para de explorar. "
Agora, os pesquisadores estão colaborando com cientistas da WHOI para usar robôs movidos a PLUMES para localizar plumas químicas em locais vulcânicos e estudar a liberação de metano em estuários costeiros em degelo no Ártico. Os cientistas estão interessados na origem dos gases químicos liberados na atmosfera, mas esses sites de teste podem abranger centenas de milhas quadradas.
"Eles podem [usar PLUMES para] passar menos tempo explorando essa área enorme e realmente se concentrar na coleta de amostras cientificamente valiosas, "Preston diz.
Esta história foi republicada por cortesia do MIT News (web.mit.edu/newsoffice/), um site popular que cobre notícias sobre pesquisas do MIT, inovação e ensino.