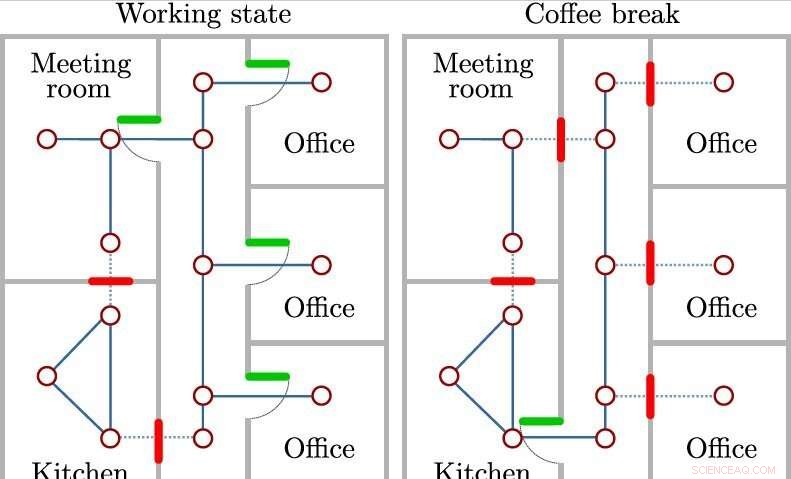
Um exemplo simples de configurações repetidas em um escritório. Crédito:Nardi &Stachniss.
Para navegar com eficácia pelos arredores, robôs normalmente planejam caminhos com base em mapas pré-concebidos do ambiente em que estão operando e observações coletadas por seus sensores. Embora esse tipo de estratégia de navegação possa ser útil em ambientes simples e estáticos, está longe de ser ideal em outros mais complexos e imprevisíveis, como os encontrados no mundo real.
Na verdade, mesmo que os mapas alimentados por um robô tenham sido compilados cuidadosamente e sejam precisos, eles não levam em consideração obstáculos inesperados ou mudanças no ambiente. Como a maioria dos ambientes em que os robôs devem eventualmente ser implantados (por exemplo, hospitais, shoppings, aeroportos, etc.) são altamente imprevisíveis e mudam rapidamente, abordagens de navegação que dependem principalmente de mapas pré-concebidos podem resultar em trajetórias e estratégias de navegação ruins.
Ciente deste problema, dois pesquisadores da Universidade de Bonn desenvolveram recentemente uma abordagem que pode permitir que os robôs naveguem em ambientes internos que mudam rapidamente de forma mais eficaz por longos períodos de tempo. Esta nova abordagem, apresentado em um artigo pré-publicado no arXiv, funciona essencialmente capturando padrões repetidos de como um ambiente está mudando e explorando esse conhecimento para tomar decisões de navegação informadas.
"A ideia deste estudo é que muitas mudanças em ambientes internos acontecem seguindo padrões espaciais repetidos, por exemplo, portas abrindo e fechando ao mesmo tempo, "Lorenzo Nardi, um dos pesquisadores que realizou o estudo, contado TechXplore . "Robôs que são implantados por longos períodos de tempo nesses ambientes podem observar e coletar continuamente informações sobre ele e explorar esse conhecimento para planejar melhores estratégias de navegação."
Em um estudo anterior, a mesma equipe de pesquisadores desenvolveu uma abordagem que reúne informações sobre como um terreno está afetando a navegação externa de um robô e a usa para calcular trajetórias que minimizam as vibrações a bordo e o consumo de energia. Em seu novo estudo, eles decidiram se concentrar na navegação de robôs em ambientes fechados, prevendo as diferentes configurações que um ambiente assume ao longo do tempo.
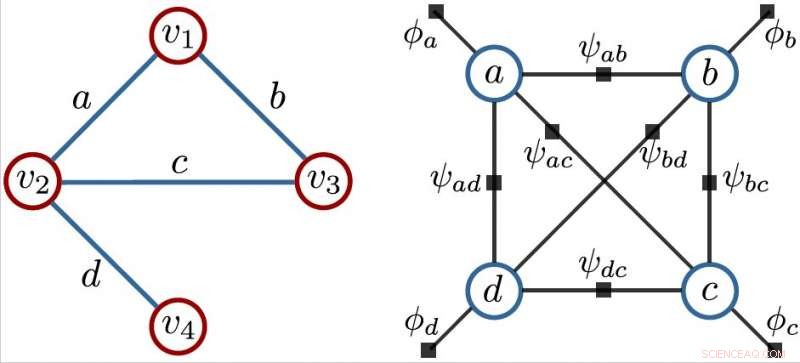
Um exemplo de topologia (esquerda) e o modelo gráfico probabilístico usado pelos pesquisadores em seu trabalho (direita). Crédito:Nardi &Stachniss.
A abordagem que eles desenvolveram foi projetada para aprimorar a navegação interna de um robô modelando padrões de mudanças ambientais dinâmicas e explorando essas informações para planejar caminhos para o robô. Usando sua abordagem, um robô, portanto, encontra menos obstáculos e passagens bloqueadas ao longo de seu caminho até um determinado local.
“A principal vantagem da nossa abordagem é que ela considera uma representação do ambiente capaz de integrar continuamente novas observações sobre o ambiente, "Nardi explicou." Esta representação permite planejar melhores trajetórias ao longo do tempo do que os gananciosos planejadores de caminhos mais curtos baseados em mapas geométricos estáticos do ambiente. "
Os pesquisadores avaliaram sua abordagem aplicando-a a uma série de cenários em quatro ambientes internos diferentes:um pequeno escritório, um escritório médio, um grande escritório e um hospital. Nestes experimentos, sua abordagem funcionou muito bem, planejamento de caminhos eficazes que considerem as mudanças ambientais. Além disso, eles compararam sua abordagem com as técnicas existentes baseadas em mapas estáticos e descobriram que ela gera caminhos mais curtos e melhores quando o robô é implantado por longos períodos de tempo.
"Nossos resultados mostram que embora a complexidade do sistema de navegação aumente, nossa abordagem leva o robô ao longo do tempo a fornecer previsões precisas sobre as configurações do ambiente e explorar esse conhecimento para navegar por caminhos mais curtos, "Nardi disse.
No futuro, a abordagem proposta por Nardi e seu colega Cyrill Stachniss pode ajudar a aprimorar a navegação do robô em ambientes internos que mudam rapidamente. Pode ser particularmente útil em ambientes onde a eficiência de um robô é crítica, como hospitais. Os pesquisadores agora planejam testar sua abordagem usando uma plataforma robótica real, pois isso permitirá que eles avaliem se as descobertas iniciais que coletaram ainda são válidas em cenários da vida real.
"Outra direção interessante para pesquisas futuras poderia ser tentar integrar comportamentos dinâmicos de alta frequência, como outros agentes dinâmicos móveis, na estrutura, "Nardi disse.
© 2019 Science X Network