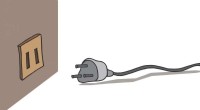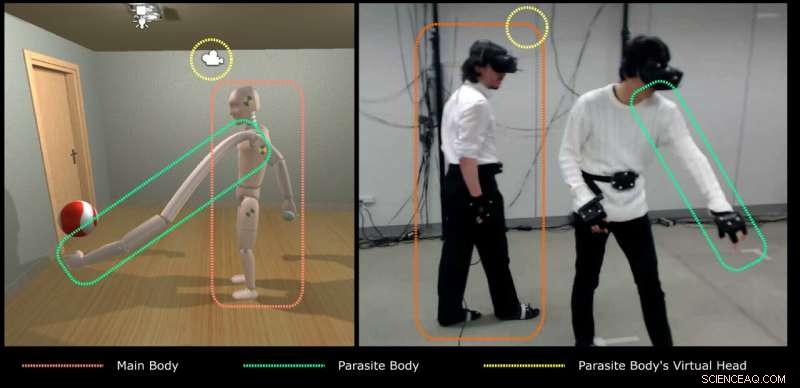
O corpo parasita em dois contextos. À esquerda, a perspectiva de VR. À direita, o espaço real com ambos os participantes. O participante à esquerda (indicado em vermelho) controla o corpo principal. O participante à direita (indicado em verde) controla o membro parasita. O círculo amarelo indica a posição da câmera em ambos os contextos. Crédito:Takizawa et al.
Avanços recentes na robótica permitiram o desenvolvimento de sistemas para auxiliar os humanos em uma variedade de tarefas. Um tipo de sistema robótico que ganhou popularidade substancial nos últimos anos são os braços robóticos vestíveis operados remotamente por terceiros.
Enquanto auxilia os usuários, esses braços precisam coletar feedback visual e compartilhá-lo com o operador terceirizado. Esse feedback pode ser coletado de várias maneiras, o mais comum é colocar uma câmera no usuário 'hospedando' o braço robótico, também conhecido como operador de corpo principal (MBO). Esta abordagem específica para coletar dados visuais, Contudo, pode ser um pouco limitante, pois é altamente dependente dos movimentos do usuário que está usando o sistema.
Com esta limitação em mente, pesquisadores da Universidade Keio, RIKEN AIP e a Universidade de Tóquio desenvolveram recentemente um sistema de realidade virtual (VR) para investigar o conceito de "edição corporal, "que envolve o uso de membros robóticos vestíveis para ajudar os humanos nas tarefas do dia-a-dia. Sua pesquisa foi financiada pelo programa Exploratory Research for Advanced Technology (ERATO) da Agência de Ciência e Tecnologia do Japão (JST).
"O objetivo geral de nosso trabalho recente era estudar a edição corporal como parte de nosso grupo de pesquisa, ERATO JIZAI, "Adrien Verhulst, um dos pesquisadores que realizou o estudo, disse TechXplore. "Edição de corpo, como estender o corpo com tecnologia robótica de apoio vestível, é um conceito fácil de encontrar em algumas áreas culturais, como na série de mangá Parasyte , por Hitoshi Iwaaki. Nós pensamos para nós mesmos, 'Ter um ser artificial ligado a você e auxiliando-o é exatamente o que estamos procurando, 'então tentamos replicar vagamente a ideia em VR. "
Verhulst e seus colegas queriam realizar o que poderia ser chamado de experimento de "corpo compartilhado". Em vez de propor uma solução para superar as limitações dos sistemas atuais para coletar feedback visual, eles se propuseram a comparar e avaliar as abordagens existentes.
Para fazer isso, eles desenvolveram um sistema de RV que usa a tecnologia optitrack para rastrear o corpo do usuário e um head-mounted display (HMD) para visualizar a direção do corpo do MBO e do braço robótico. Em seu jornal, os pesquisadores referem-se ao usuário do braço robótico como o "corpo principal" e ao teleoperador terceirizado como o "corpo parasita".
"É lógico pensar que se o 'corpo do parasita' estiver ligado ao corpo principal, então, quando o corpo principal se move, o parasita vai acabar doente, certo? "disse Verhulst." Conseqüentemente, as perguntas que nos colocamos são:Como devemos adaptar o feedback visual coletado pelo corpo? Deve ser uma terceira visão, como no videogame? Então, onde deve ser colocado:acima do corpo principal, no lado, ou melhor, perto da ação? Talvez pudéssemos compartilhar a mesma visão? Ou uma visão dependendo da movimentação de ambas as pessoas? "
Equipes de diferentes empresas e instituições apresentaram várias abordagens para reunir feedback visual de braços robóticos. O mais proeminente entre eles é o conceito de "visão compartilhada", a visão de terceira pessoa e a visão de perto da ação.
Conforme sugerido por seus nomes, a abordagem de visão compartilhada coleta feedback visual que corresponde ao que o usuário que usa o braço robótico vê; a terceira pessoa vê o que uma terceira pessoa veria se estivesse ao lado ou atrás do usuário, e a visualização de perto da ação mostra um close da tarefa que está sendo concluída. Os pesquisadores queriam investigar se esses diferentes modos de visualização deveriam ser dependentes do movimento do corpo principal, o corpo do parasita, ou ambos.
Para explorar esta questão, eles realizaram um experimento em 16 usuários humanos usando o sistema VR que desenvolveram. Isso permitiu que eles reunissem informações interessantes sobre diferentes abordagens para a coleta de feedback visual. Apesar disso, suas descobertas ainda são preliminares, já que o número de pessoas que participaram de seu estudo é limitado.
"As pessoas precisam se sentir orientadas na direção de seus membros para usá-lo. Tente isto:se você colocar uma câmera em um ângulo estranho, e só pode se ver daquela câmera, você terá mais dificuldade para mover o braço em uma determinada direção, "Verhulst explicou." Isso significa que cada vez que o corpo principal se move, o corpo do parasita se reorienta. Interessantemente, não notamos uma diferença acentuada nas pontuações de propriedade do corpo, o que significa que não importa o ponto de vista, os participantes sentiram que eram "donos" de seu corpo, e que eles estavam no controle disso. "
As observações reunidas por Verhulst e seus colegas sugerem que a dependência do ponto de vista não é tão importante. Em outras palavras, se alguém coleta feedback visual ao colocar uma câmera no braço robótico, no ombro do usuário humano, ou entre os dois, ele / ela ainda pode obter a "propriedade corporal" correta ao olhar pela câmera.
"Os resultados que coletamos foram muito surpreendentes, "Verhulst acrescentou." Também não observamos nenhuma dificuldade significativa em termos de carga de trabalho (ou seja, carga física, carga mental, esforço, Tempo), que, novamente, dicas de que a dependência da câmera não importa a esse respeito. Contudo, o desempenho dos participantes foi um pouco melhor em situações em que a visão depende tanto do corpo principal quanto do parasita, sugerindo que, para eficácia máxima, pode ser melhor colocar a câmera no corpo principal, mas ser motorizado para seguir o movimento da pessoa que controla o braço do robô. "
A investigação conduzida por esta equipe de pesquisadores focou especificamente na dependência de perspectiva de operadores terceirizados de braços robóticos em tarefas que envolviam encontrar e alcançar objetos. No futuro, o sistema VR que desenvolveram também pode ser usado para estudar abordagens para reunir feedback visual sobre tarefas mais elaboradas e realistas.
"O próximo passo é criar um ambiente experimental com situações e configurações mais realistas, "Ryo Takizawa, outro pesquisador envolvido no estudo, disse TechXplore. "Para explorar métodos de cooperação em trabalho colaborativo, estamos pensando em restringir os métodos de comunicação e melhorar os modelos de RV, e assim por diante."
Os pesquisadores decidiram usar a RV e realizar um experimento virtual porque era uma solução fácil e barata que não exigia a manutenção de sistemas robóticos avançados. A fim de verificar a validade de suas descobertas, Contudo, eles eventualmente precisarão comparar seus resultados com os obtidos usando um braço robótico real.
Em seu trabalho futuro, Verhulst e seus colegas também planejam realizar um experimento semelhante em que os participantes são treinados na tarefa que irão completar de antemão, pois acreditam que isso levaria a resultados diferentes. Neste estudo, na verdade, os usuários não receberam nenhum treinamento prévio antes de usar sua plataforma de RV.
"Precisamos considerar como projetar uma tarefa ou programa de treinamento em um contexto corporal editado e compartilhado, especialmente em termos de como suavizar, se não melhorar, tarefas cooperativas, "Katie Seaborn, outro pesquisador que estava envolvido no estudo, disse TechXplore. "Venho explorando a noção de mesmo tempo, sincronia do mesmo movimento, que tem sido associada a impulsos no desempenho cooperativo em outros contextos. Queremos saber se essa estratégia de 'ação compartilhada' funcionaria neste caso, com duas pessoas compartilhando um corpo muito incomum em RV. "
© 2019 Science X Network