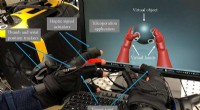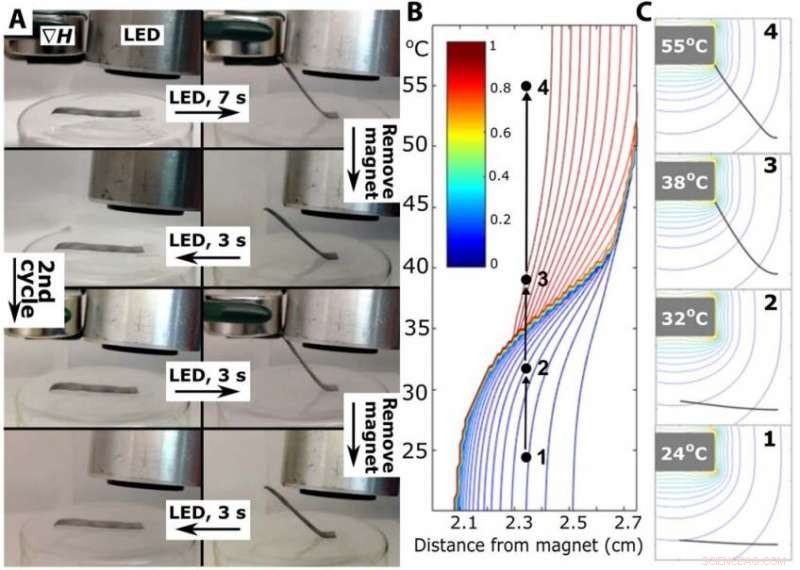
Cantilever com memória de forma contendo partículas magnéticas encadeadas. (A) Atuação e (B e C) simulações de um filme cantilever DiAPLEX contendo partículas magnéticas em cadeia. O ímã permanente (∇H) e o LED são indicados no painel superior esquerdo. (B) Os contornos mostram o grau de atuação (0, plano; 1, ímã de contato) de um filamento simulado em uma gama de posições e temperaturas. (C) Imagens estáticas simuladas correspondem a pontos discretos ao longo do caminho indicado em (B), a uma distância de 2,3 cm do ímã, o que é consistente com a geometria experimental à esquerda. Veja os filmes S1 e S2 para experimentos e simulações do cantilever. Crédito:Jessica A.-C. Liu, Universidade Estadual da Carolina do Norte.
Pesquisadores da North Carolina State University e da Elon University desenvolveram uma técnica que lhes permite controlar remotamente o movimento de robôs macios, bloqueie-os na posição pelo tempo que for necessário e, mais tarde, reconfigure os robôs em novas formas. A técnica se baseia em campos magnéticos e de luz.
"Estamos particularmente entusiasmados com a reconfigurabilidade, "diz Joe Tracy, professor de ciência dos materiais e engenharia na NC State e autor correspondente de um artigo sobre o trabalho. "Ao projetar as propriedades do material, podemos controlar o movimento do robô macio remotamente; podemos fazer com que mantenha uma determinada forma; podemos então retornar o robô à sua forma original ou modificar ainda mais seu movimento; e podemos fazer isso repetidamente. Todas essas coisas são valiosas, em termos da utilidade desta tecnologia em aplicações biomédicas ou aeroespaciais. "
Para este trabalho, os pesquisadores usaram robôs suaves feitos de um polímero incorporado com micropartículas de ferro magnético. Em condições normais, o material é relativamente rígido e mantém sua forma. Contudo, pesquisadores podem aquecer o material usando luz de um diodo emissor de luz (LED), o que torna o polímero flexível. Uma vez flexível, pesquisadores demonstraram que podiam controlar a forma do robô remotamente, aplicando um campo magnético. Depois de formar a forma desejada, pesquisadores poderiam remover a luz LED, permitindo que o robô retome sua rigidez original - travando efetivamente a forma no lugar.
Ao aplicar a luz uma segunda vez e remover o campo magnético, os pesquisadores conseguiram fazer com que os robôs macios voltassem às suas formas originais. Ou eles podem aplicar a luz novamente e manipular o campo magnético para mover os robôs ou fazê-los assumir novas formas.
Em testes experimentais, os pesquisadores demonstraram que os soft robôs podem ser usados para formar "agarradores" para levantar e transportar objetos. Os robôs macios também podem ser usados como cantiléveres, ou dobrado em "flores" com pétalas que se dobram em direções diferentes.
"Não estamos limitados a configurações binárias, como um agarrador sendo aberto ou fechado, "diz Jessica Liu, primeiro autor do artigo e um Ph.D. estudante na NC State. "Podemos controlar a luz para garantir que um robô manterá sua forma em qualquer ponto."
Além disso, os pesquisadores desenvolveram um modelo computacional que pode ser usado para agilizar o processo de design do robô soft. O modelo permite que eles ajustem a forma de um robô, espessura do polímero, a abundância de micropartículas de ferro no polímero, e o tamanho e a direção do campo magnético necessário antes de construir um protótipo para realizar uma tarefa específica.
"As próximas etapas incluem otimizar o polímero para diferentes aplicações, "Tracy diz." Por exemplo, polímeros de engenharia que respondem a diferentes temperaturas para atender às necessidades de aplicações específicas. "
O papel, "Reconfiguração fototermal e magneticamente controlada de compostos de polímero para robótica suave, "aparece no jornal Avanços da Ciência . A primeira autora do artigo é Jessica Liu, um Ph.D. estudante na NC State. O artigo foi coautor de Jonathan Gillen, um ex-graduando na NC State; Sumeet Mishra, um ex-Ph.D. estudante da NC State; e Benjamin Evans, um professor associado de física na Elon University.