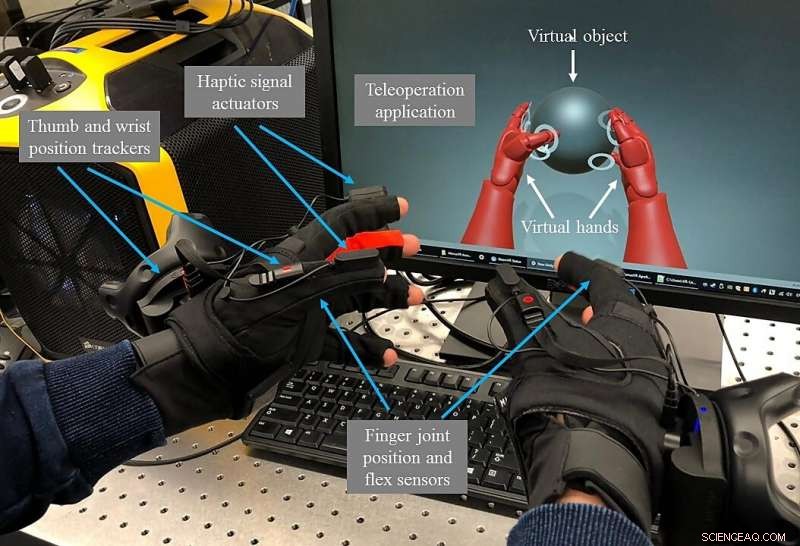
Configuração experimental demonstrando aplicações homem-máquina. Crédito:S. Mondal, et al., A universidade de Melbourne
Uma Internet Tátil é potencialmente a próxima fase da Internet das Coisas, em que humanos podem tocar e interagir com objetos remotos ou virtuais enquanto experimentam feedback tátil realista.
Uma equipe de pesquisadores liderada por Elaine Wong da Universidade de Melbourne, Austrália, desenvolveu um método para melhorar as experiências de feedback tátil em aplicativos homem-máquina que são típicos na Internet tátil. Os pesquisadores acreditam que seu método pode ser usado para prever feedback adequado em aplicações que variam de assistência médica eletrônica a jogos de realidade virtual.
Wong e seus colegas apresentarão o módulo proposto, que usa uma rede neural artificial para prever o material tocado, na Conferência e Exposição de Comunicação de Fibra Ótica (OFC), a ser realizado de 8 a 12 de março de 2020 no Centro de Convenções de San Diego, Califórnia, EUA.
Dependendo da dinamicidade da interação, um aplicativo humano-máquina ideal pode exigir um tempo de resposta da rede de apenas um milissegundo.
"Esses tempos de resposta impõem um limite na distância entre humanos e máquinas, "disse Wong." Portanto, soluções para separar essa distância do tempo de resposta da rede são essenciais para a realização da Internet tátil. "
Como um passo em direção a esse objetivo, a equipe treinou um algoritmo de aprendizado por reforço para adivinhar o feedback tátil apropriado em um sistema homem-máquina antes que o feedback correto seja conhecido. O módulo, chamada de previsão de amostra HAptic baseada em eventos (EHASAF), acelera o processo, fornecendo uma resposta ao toque com base em uma previsão probabilística do material com o qual o usuário está interagindo.
"Para facilitar as aplicações homem-máquina em redes de longa distância, contamos com inteligência artificial para superar os efeitos da longa latência de propagação, "disse Sourav Mondal, um autor no papel.
Uma vez que o material real é identificado, a unidade adapta e atualiza sua distribuição de probabilidade para ajudar a escolher o feedback adequado no futuro.
O grupo testou o módulo EHASAF com um par de luvas de realidade virtual usadas por um humano para tocar uma bola virtual. As luvas contêm sensores nos dedos e pulsos para detectar toques e rastrear movimentos, forças e a orientação da mão.
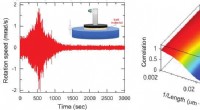
Dependendo de qual bola de material o usuário escolhe tocar das quatro opções virtuais fornecidas, o feedback da luva deve variar. Por exemplo, uma bola de metal será mais firme do que uma bola de espuma. Quando uma rede neural determina que um dos dedos tocou a bola, o módulo EHASAF começa a percorrer as opções de feedback para gerar até resolver o material real da bola escolhida.
Atualmente, com quatro materiais, a precisão de previsão do módulo é de cerca de 97%.
“Achamos que é possível melhorar a precisão da previsão com um maior número de materiais, "disse Mondal." No entanto, modelos mais sofisticados baseados em inteligência artificial são necessários para conseguir isso. "
"Modelos cada vez mais sofisticados com desempenho aprimorado podem ser desenvolvidos com base na ideia fundamental de nosso módulo EHSAF proposto, "Disse Mondal.
Esses resultados e pesquisas adicionais serão apresentados no local na OFC 2020.