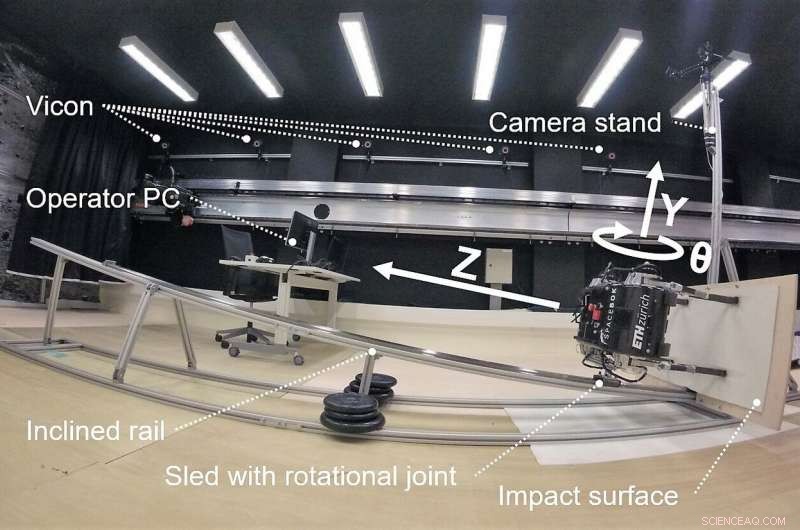
Jogando Pong com o clássico SpaceBok de videogame. Para simular a gravidade cada vez mais baixa dos asteróides, a equipe SpaceBok usou o piso mais plano da Holanda - um piso de epóxi 4,8 x 9 m alisado para uma planura geral de 0,8 mm, chamado Banco de Robótica Orbital para Tecnologia Integrada (ORBIT), parte do Laboratório de Robótica Orbital e Navegação de Orientação e Controle da ESA. SpaceBok foi colocado de lado, em seguida, anexado a uma plataforma flutuante para reproduzir as condições zero-G em duas dimensões. Ao pular de uma parede, sua roda de reação permitiu que ela girasse no meio do salto, deixando-o pousar de novo no outro lado da câmara - como se estivesse pulando ao longo de uma única superfície de baixa gravidade em escala reduzida. Crédito:ETH Zurich / ZHAW Zurich
Os astronautas na Lua se viram pulando, em vez de simplesmente caminhar. O robô de exploração planetária SpaceBok da Suíça seguiu seu exemplo, lançar todas as quatro pernas do solo durante os testes no coração técnico da ESA.
SpaceBok é um robô quadrúpede projetado e construído por uma equipe de estudantes suíços da ETH Zurich e ZHAW Zurich. Atualmente está sendo testado usando instalações robóticas no centro técnico ESTEC da ESA na Holanda.
O trabalho prossegue sob a liderança do Ph.D. estudante Hendrik Kolvenbach do Laboratório de Sistemas Robóticos da ETH Zurich, atualmente baseado em ESTEC. O robô está sendo usado para investigar o potencial da "caminhada dinâmica" para se locomover em ambientes de baixa gravidade.
Hendrik explica:"Em vez de andar estático, onde pelo menos três pernas ficam no chão o tempo todo, a caminhada dinâmica permite andadas com fases de voo completas, durante as quais todas as pernas ficam fora do solo. Os animais fazem uso de andamentos dinâmicos devido à sua eficiência, mas até recentemente, o poder computacional e os algoritmos necessários para o controle tornavam difícil realizá-los em robôs.
"Para os ambientes de baixa gravidade da Lua, Marte ou asteróides, pular do chão como esse acaba sendo uma maneira muito eficiente de se locomover. "
"Os astronautas que se movem na gravidade de um sexto da Lua adotaram o salto instintivamente. O SpaceBok pode atingir 2 m de altura na gravidade lunar, embora tal altura represente novos desafios. Uma vez que sai do solo, o robô com pernas precisa se estabilizar para descer novamente com segurança - ele está basicamente se comportando como uma mini-espaçonave neste ponto, "diz o membro da equipe Alexander Dietsche.
"Então, o que fizemos foi aproveitar um dos métodos que um satélite convencional usa para controlar sua orientação, chamada de roda de reação. Ele pode ser acelerado e desacelerado para desencadear uma reação igual e oposta no próprio SpaceBok, "explica o membro da equipe Philip Arm.
"Além disso, As pernas do SpaceBok incorporam molas para armazenar energia durante a aterrissagem e liberá-la na decolagem, reduzindo significativamente a energia necessária para alcançar esses saltos, "adiciona outro membro da equipe, Benjamin Sun.
A equipe está aumentando lentamente a altura dos saltos repetitivos do robô, até 1,3 metros em condições de gravidade lunar simulada até agora.
As plataformas de teste foram configuradas para simular vários ambientes de gravidade, imitando não apenas as condições lunares, mas também as gravidades muito baixas dos asteróides. Quanto menor a gravidade, mais longa pode ser a fase de voo para cada salto do robô, mas é necessário um controle efetivo tanto para a decolagem quanto para a aterrissagem.
As plataformas de teste para SpaceBok foram configuradas para simular vários ambientes de gravidade, imitando não apenas as condições lunares, mas também as gravidades muito baixas dos asteróides. Quanto menor a gravidade, mais longa pode ser a fase de voo para cada salto do robô, mas é necessário um controle efetivo tanto para a decolagem quanto para a aterrissagem. Crédito:ETH Zurich / ZHAW Zurich
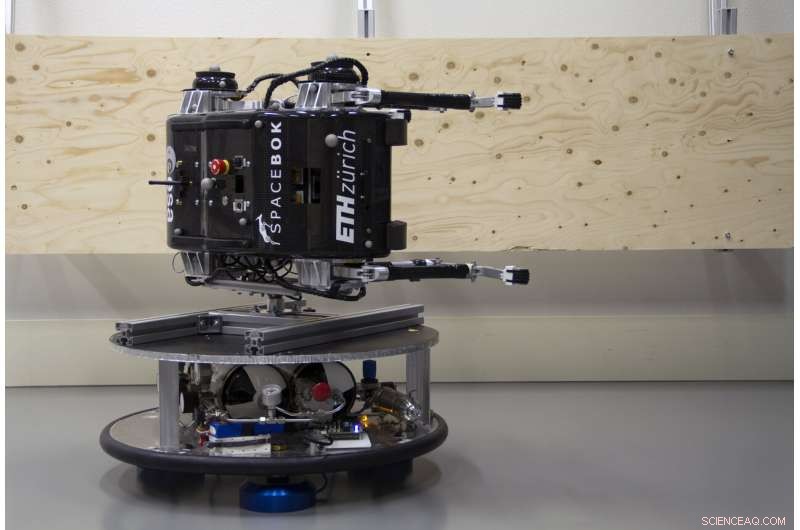
SpaceBok é um robô quadrúpede projetado e construído por uma equipe de estudantes suíços da ETH Zurich e ZHAW Zurich. Atualmente está sendo testado usando instalações robóticas no centro técnico ESTEC da ESA na Holanda. O robô está sendo usado para investigar o potencial da "caminhada dinâmica" para se locomover em ambientes de baixa gravidade. As plataformas de teste foram configuradas para simular vários ambientes de gravidade. O SpaceBok pode atingir potencialmente 2 m de altura na gravidade lunar, embora tal altura exija que o robô se estabilize com uma roda de reação que desça novamente com segurança. Crédito:ETH Zurich / ZHAW Zurich
SpaceBok montado lateralmente em uma plataforma de rolamento de ar de flutuação livre. Para simular a gravidade cada vez mais baixa dos asteróides, a equipe SpaceBok usou o piso mais plano da Holanda - um piso de epóxi 4,8 x 9 m alisado para uma planura geral de 0,8 mm, chamado Banco de Robótica Orbital para Tecnologia Integrada (ORBIT), parte do Laboratório de Robótica Orbital e Navegação de Orientação e Controle da ESA. SpaceBok foi colocado de lado, em seguida, anexado a uma plataforma flutuante para reproduzir as condições zero-G em duas dimensões. Ao pular de uma parede, sua roda de reação permitiu que ela girasse no meio do salto, deixando-o pousar de novo no outro lado da câmara - como se estivesse pulando ao longo de uma única superfície de baixa gravidade em escala reduzida. Crédito:ETH Zurich / ZHAW Zurich 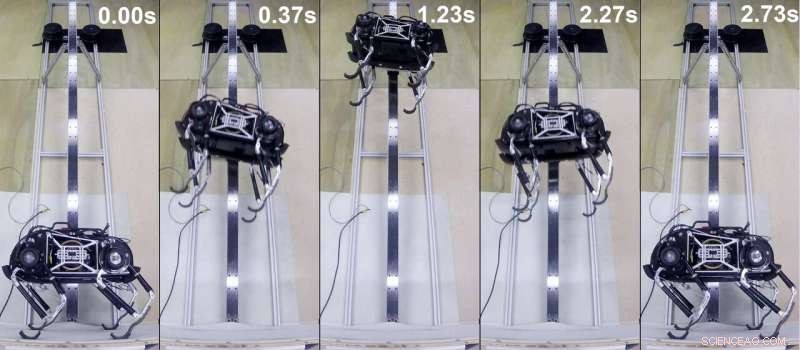
SpaceBok foi colocado de lado, em seguida, anexado a uma plataforma flutuante para reproduzir as condições zero-G em duas dimensões. Ao pular de uma parede, sua roda de reação permitiu que ela girasse no meio do salto, deixá-lo pousar de novo no outro lado da câmara - como se estivesse pulando ao longo de uma única superfície de baixa gravidade em escala reduzida.
Hendrik acrescentou:"Os testes foram tão bons que até usamos o SpaceBok para jogar um jogo de ação ao vivo de Pong, o clássico dos videogames. "
O teste continuará em condições mais realistas, com saltos feitos sobre obstáculos, terreno acidentado, e solo realista, eventualmente saindo de casa.
Hendrik está estudando na ESTEC através da Networking Partnering Initiative da ESA, destina-se a aproveitar a pesquisa acadêmica avançada para aplicações espaciais.