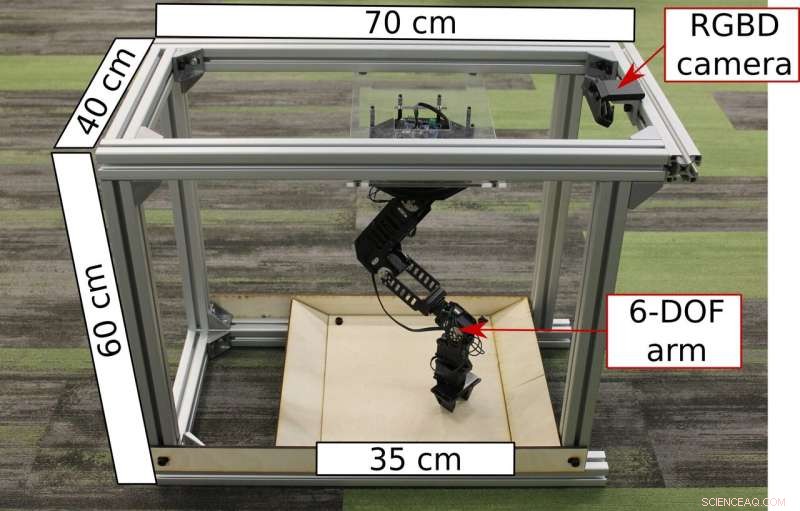
Um close-up da célula REPLAB com anotações. Crédito:Yang et al.
Pesquisadores da UC Berkeley desenvolveram um reproduzível, plataforma de benchmark compacta e de baixo custo para avaliar abordagens de aprendizagem robótica, que eles chamaram de REPLAB. Seu estudo recente, apresentado em um artigo pré-publicado no arXiv, foi apoiado por Berkeley DeepDrive, o Office of Naval Research (ONR), Google, NVIDIA e Amazon.
"Abordagens baseadas em aprendizado de máquina começaram a se tornar populares na robótica recentemente, mas atualmente não há uma maneira fácil de comparar abordagens devido às grandes diferenças nas configurações de hardware usadas em vários laboratórios, "Brian Yang, um dos pesquisadores que realizou o estudo, disse TechXplore. "Por exemplo, na compreensão da pesquisa, tudo, desde o tipo de braço ou garra até o material de que a garra é feita, afeta o desempenho de agarramento, então, mesmo que você consiga uma melhor precisão de compreensão do que um método do ano passado, não está claro se isso se deve a um melhor controle ou apenas a um hardware melhor. "
Nos últimos anos, tem havido uma necessidade crescente de medidas padronizadas e plataformas de referência para avaliar abordagens de aprendizado de máquina para robótica. Estabelecer benchmarks eficazes às vezes pode ser desafiador, particularmente para o aprendizado de robótica, onde se espera que os robôs generalizem os modelos aprendidos para novos objetos e situações. A nova plataforma de benchmark desenvolvida na UC Berkeley oferece uma solução de baixo custo e facilmente reproduzível para testar abordagens de manipulação de objetos de robótica.
"Outras aplicações de aprendizado de máquina, como visão computacional e processamento de linguagem natural, se beneficiaram muito com conjuntos de dados e benchmarks, à medida que direcionam o foco da pesquisa em problemas importantes, fornecem uma maneira de mapear o progresso de uma comunidade de pesquisa, e ajuda a identificar rapidamente, disseminar, e melhorar as ideias que funcionam bem, "Dinesh Jayaraman, outro pesquisador envolvido no estudo, disse TechXplore. "Projetamos o REPLAB para atender a essa função para a comunidade de pesquisa em aprendizagem de robôs."
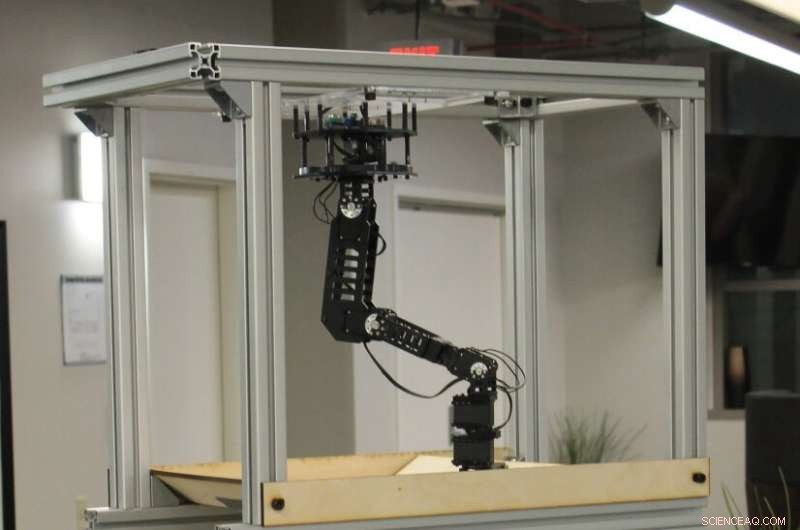
Duas células REPLAB empilhadas uma em cima da outra. Crédito:Yang et al.
REPLAB tem vários componentes, incluindo um braço robótico, uma câmera e um espaço de trabalho, colocado em um espaço cubóide de 70 x 40 x 60 cm. A construção da plataforma custa aproximadamente US $ 2.000 e pode ser montada em apenas algumas horas. Seu design compacto e de baixo custo poderia permitir mais pesquisadores, mesmo aqueles com um orçamento restrito, para avaliar suas estruturas e abordagens.
"REPLAB é uma plataforma de hardware totalmente padronizada para manipulação robótica projetada com fácil adoção em mente, "Jayaraman explicou." Ele contém um único braço de baixo custo (Trossen WidowX), uma câmera RGB-D (Intel Realsense SR300) e uma câmera padronizada, espaço de trabalho compacto que é fácil de montar em poucas horas usando nossas instruções de montagem. Todos juntos, uma célula REPLAB inteira custa cerca de 2k USD (em comparação com as configurações de braço padrão que custam 40-50k), ocupando cerca de 10x menos espaço do que uma configuração de braço padrão. "
Além da própria plataforma, os pesquisadores propuseram um modelo para um benchmark de compreensão que inclui uma definição de tarefa e protocolo de avaliação, medidas de desempenho e um conjunto de dados de 92, 000 tentativas de agarrar. As linhas de base para este benchmark foram estabelecidas por meio da implementação, avaliação e análise de várias abordagens de agarramento existentes.
"Porque temos essa plataforma de hardware padronizada, também podemos compartilhar um pacote de software de código aberto com implementações de vários algoritmos de aprendizagem de robôs (até agora, algoritmos de aprendizagem supervisionada para compreensão e algoritmos de aprendizagem de reforço para alcançar o ponto 3-D), "Jayamaran disse." Se você construir sua própria célula REPLAB, você pode baixar uma imagem do Docker contendo essas implementações e executá-las prontas para usar em seu celular. "
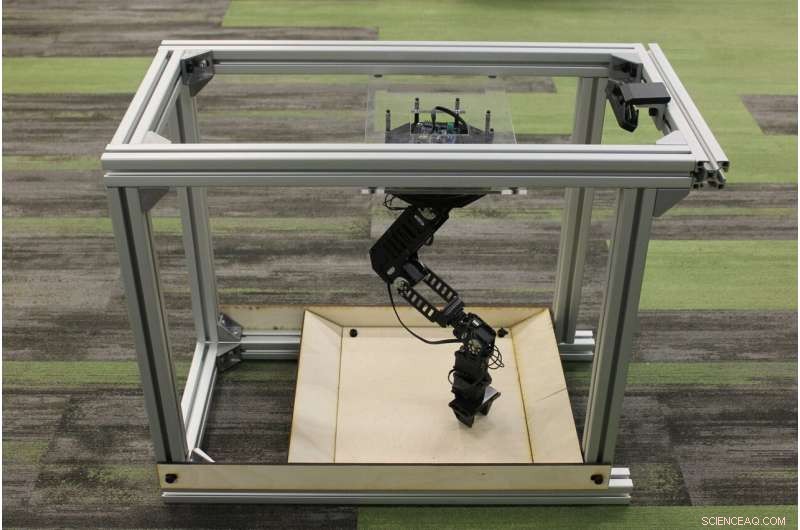
Uma célula REPLAB sem anotações. Crédito:Yang et al.
Até aqui, os pesquisadores realizaram avaliações principalmente com o objetivo de verificar a viabilidade do REPLAB como uma plataforma de pesquisa reproduzível em aprendizagem de robótica, concentrando-se em duas tarefas específicas:agarrar e alcançar o ponto 3-D. Em outras palavras, eles usaram sua plataforma para implementar e avaliar várias abordagens de aprendizagem supervisionada profunda para essas tarefas específicas de agarramento. Suas descobertas sugerem que a plataforma expõe algoritmos existentes a desafios pouco estudados que são cruciais para o desenvolvimento de robôs que funcionam bem em estado selvagem, como a atuação ruidosa.
"Também verificamos que os resultados permanecem consistentes em várias células REPLAB, o que é importante para pensar em implementações e avaliações de algoritmos baseados em REPLAB como reproduzíveis, "Jayamaran disse." Acreditamos que REPLAB facilitará métricas de progresso consistentes e reproduzíveis para a aprendizagem de robôs, diminuir a barreira de entrada na robótica para pesquisadores em disciplinas relacionadas, como aprendizado de máquina, e encorajar códigos e dados compartilháveis entre pesquisadores. "
A nova plataforma introduzida por Yang, Jayaraman e seus colegas poderão em breve permitir que mais pesquisadores avaliem abordagens para uma ampla gama de tarefas de manipulação. Como outras plataformas de benchmank, Contudo, para ter sucesso, o uso de REPLAB deve envolver a comunidade de pesquisa em aprendizagem de robôs em geral.
"Embora estejamos investindo na manutenção da plataforma por muitos anos, estamos convidando contribuições da comunidade, como novas implementações de algoritmos, conjuntos de dados, e benchmarks e para nossa plataforma de código aberto, "Jayaraman disse." A grande visão é chegar a um ponto onde, se um novo algoritmo de aprendizagem de robô de última geração for lançado, um pesquisador em qualquer lugar do mundo seria capaz de fazer o download, Avalie, iterar e melhorar uma implementação em alguns dias. Achamos que REPLAB ajuda a acelerar a pesquisa fazendo duas coisas:diminuindo a barreira de entrada e permitindo que muito mais pessoas participem de pesquisas de ponta, e permitindo esse tipo de iteração e melhoria rápida por meio do compartilhamento de código. "
Em seu trabalho futuro, os pesquisadores da UC Berkeley planejam desenvolver ainda mais sua plataforma, adicionando um simulador de células REPLAB completo e algoritmos para controle robusto, ao mesmo tempo em que lida com novos desafios de manipulação. Eles também esperam ampliar a imagem oficial do repositório github e do docker da REPLAB, incluindo implementações de algoritmos mais modernos.
© 2019 Science X Network














