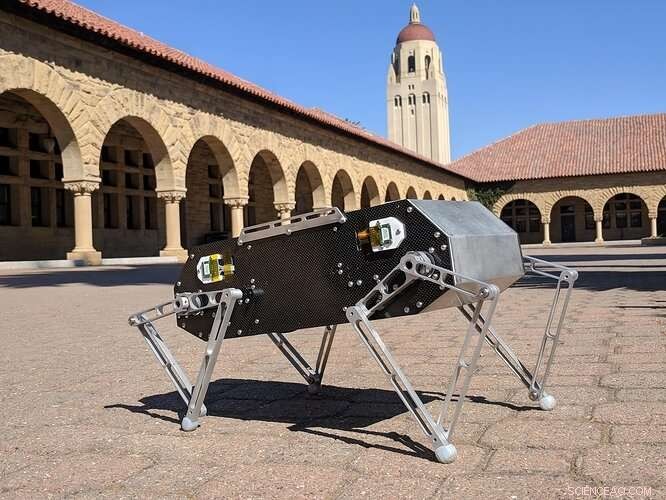
Projeto Stanford Doggo:um robô quadrúpede movido a ODrive
Colocando seu próprio toque em robôs que perambulam por paisagens complicadas, a equipe de mobilidade extrema do clube Stanford Student Robotics desenvolveu um robô de quatro patas que não só é capaz de realizar acrobacias e atravessar terrenos desafiadores, mas também foi projetado com a reprodutibilidade em mente. Quem quiser sua própria versão do robô, apelidado de Stanford Doggo, pode consultar planos abrangentes, código e uma lista de suprimentos que os alunos disponibilizaram gratuitamente online.
"Vimos esses outros robôs quadrúpedes usados em pesquisas, mas não eram algo que você pudesse trazer para seu próprio laboratório e usar em seus próprios projetos, "disse Nathan Kau, '20, graduado em engenharia mecânica e líder na Extreme Mobility. "Queríamos que Stanford Doggo fosse esse robô de código aberto que você pudesse construir sozinho com um orçamento relativamente pequeno."
Considerando que outros robôs semelhantes podem custar dezenas ou centenas de milhares de dólares e exigir peças personalizadas, os alunos da Extreme Mobility estimam o custo do Stanford Doggo em menos de US $ 3, 000 - incluindo custos de fabricação e envio - e quase todos os componentes podem ser comprados on-line no estado em que se encontram. Eles esperam que a acessibilidade a esses recursos inspire uma comunidade de criadores e pesquisadores de Stanford Doggo que desenvolvem resultados inovadores e significativos de seu trabalho.
Stanford Doggo já pode andar, trote, dança, saltar, pule e execute o backflip ocasional. Os alunos estão trabalhando em uma versão maior de sua criação - que atualmente é do tamanho de um beagle - mas farão uma pequena pausa para apresentar Stanford Doggo na Conferência Internacional sobre Robótica e Automação em 21 de maio em Montreal, Canadá.
Um salto, um salto e uma cambalhota
Para tornar o Stanford Doggo replicável, os alunos o construíram do zero. Isso significava gastar muito tempo pesquisando suprimentos facilmente acessíveis e testando cada parte à medida que eram feitas, sem depender de simulações.
"Já se passaram cerca de dois anos desde que tivemos a ideia de fazer um quadrúpede. Definitivamente, fizemos vários protótipos antes de realmente começarmos a trabalhar nesta iteração do cão, "disse Natalie Ferrante, 19, um estudante coterminal de engenharia mecânica e membro da Equipe de Mobilidade Extrema. "Foi muito emocionante a primeira vez que o fizemos andar."
Os primeiros passos de Stanford Doggo foram, reconhecidamente, engatinhar, mas agora o robô pode manter uma marcha consistente e trajetória desejada, mesmo quando encontra diferentes terrenos. Ele faz isso com a ajuda de motores que detectam as forças externas no robô e determinam quanta força e torque cada perna deve aplicar em resposta. Esses motores recomputam em 8, 000 vezes por segundo e são essenciais para a dança característica do robô:um boogie saltitante que esconde o fato de que não tem molas. Em vez de, os motores agem como um sistema de molas virtuais, suave, mas animadamente, recuperando o robô na forma adequada sempre que sentirem que está fora de posição.
Entre as habilidades e truques que a equipe adicionou ao repertório do robô, os alunos ficaram excepcionalmente surpresos com sua habilidade de salto. Executando Stanford Doggo em seus ritmos uma (muito) madrugada no laboratório, a equipe percebeu que estava saltando sem esforço 60 centímetros no ar. Ao empurrar os limites do software do robô, Stanford Doggo conseguiu pular 3, em seguida, 90 cm acima do solo.
"Foi quando percebemos que o robô era, em alguns aspectos, melhor desempenho do que outros robôs quadrúpedes usados em pesquisas, mesmo tendo um custo muito baixo, "lembrou Kau.
Desde então, os alunos ensinaram Stanford Doggo a fazer um backflip - mas sempre com enchimento para permitir uma rápida experimentação de tentativa e erro.
O que Stanford Doggo fará a seguir?
Se esses alunos fizerem o que quiserem, o futuro de Stanford Doggo nas mãos das massas.
"Esperamos fornecer um sistema básico que qualquer pessoa possa construir, "disse Patrick Slade, estudante de pós-graduação em aeronáutica e astronáutica e mentor da Extreme Mobility. "Dizer, por exemplo, você queria trabalhar em busca e resgate; você poderia equipá-lo com sensores e escrever código em cima do nosso que o deixaria escalar pilhas de rocha ou escavar em cavernas. Ou talvez seja pegar coisas com o braço ou carregar um pacote. "
Isso não quer dizer que não continuem seu próprio trabalho. A Extreme Mobility está colaborando com o Robotic Exploration Lab de Zachary Manchester, professor assistente de aeronáutica e astronáutica, para testar novos sistemas de controle em um segundo Stanford Doggo. A equipe também concluiu a construção de um robô com o dobro do tamanho do Stanford Doggo, que pode carregar cerca de 6 quilos de equipamento. Seu nome é Stanford Woofer.