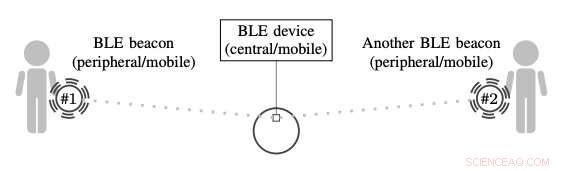
Esta figura descreve a configuração experimental geral. Um dispositivo BLE central é usado para fazer a varredura passiva de anúncios de dispositivos BLE periféricos. As pessoas podem estar equipadas com um ou mais dispositivos BLE de publicidade. O dispositivo central calcula pacotes com dados RSS e a ID dos anúncios recebidos. Esses pacotes são fornecidos por meio de uma conexão com fio a outro sistema na placa do robô ou sem fio via conexão Bluetooth para outra máquina. Como os pesquisadores não têm acesso à placa do robô, eles usaram a conexão bluetooth, gerando latência adicional. Crédito:Scheunemann et al.
Pesquisadores da Universidade de Hertfordshire propuseram recentemente uma técnica fácil e configurável que aprimora a capacidade de um robô de perceber e interagir com as pessoas ao seu redor. Sua técnica, apresentado em um artigo pré-publicado no arXiv, utiliza dispositivos Bluetooth de baixa energia (BLE) acessíveis. Entre suas muitas aplicações possíveis, pode melhorar a terapia para crianças com transtorno do espectro do autismo (ASD), permitindo que robôs atuem como mediadores e monitorem crianças em seus arredores.
"Estou interessado em robôs que possam interagir de forma totalmente autônoma, sem controle externo e sem um computador externo, "Marcus M. Scheunemann, um dos pesquisadores que realizou o estudo, disse TechXplore. "Comecei meu trabalho na Universidade de Hertfordshire para desenvolver robôs que podem ser mediadores durante a terapia de crianças com autismo."
O desenvolvimento de robôs que possam reconhecer com precisão a proximidade de e entre crianças é uma tarefa consideravelmente desafiadora. Isso ocorre porque as crianças geralmente são bastante espontâneas em seus processos de tomada de decisão, portanto, eles podem se mover muito e mudar continuamente seus estilos de interação. Isso torna mais difícil para os robôs rastrearem crianças usando métodos tradicionais, como câmeras ou sensores, particularmente se um robô é móvel e tem pouco poder computacional.
A maioria dos dispositivos de rastreamento externos que fornecem informações de proximidade aos robôs precisam de pelo menos três marcadores para serem colocados nas crianças. Além disso, para operar corretamente, eles precisam ser usados externamente e permanentemente visíveis o tempo todo.
Embora as informações fornecidas por muitos dispositivos de rastreamento existentes sejam normalmente precisas, esses dispositivos podem ser difíceis de aplicar a crianças e normalmente restringem seus movimentos a uma única sala equipada. Para superar as limitações dos métodos existentes, Scheunemann e seus colegas desenvolveram uma nova técnica que permite aos robôs reconhecer o toque e a proximidade de outros humanos usando dispositivos BLE.
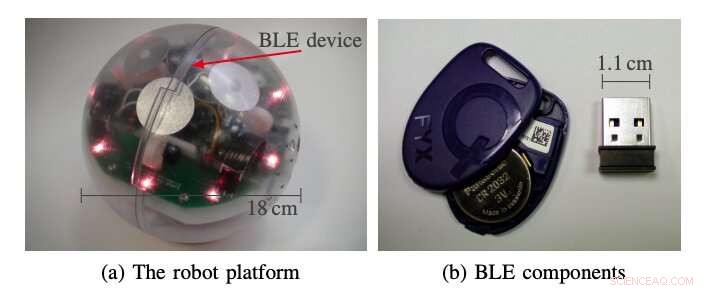
(a) A plataforma do robô móvel QueBall pode se mover para frente e para trás e inclinar para a esquerda / direita. Ele também pode emitir sons e cores e detectar o toque. Os pesquisadores não desenvolveram este robô; eles apenas o usaram como um exemplo. (b) Um farol de publicidade configurável e com alimentação própria que deve ser conectado às pessoas (à esquerda) e um dispositivo Bluetooth central, ou scanner BLE, isto é, equipa o robô para escanear seus arredores em busca da força dos sinais periféricos (direita). Crédito:Scheunemann et al.
"Utilizar o BLE é uma maneira acessível de contornar os problemas das técnicas de rastreamento existentes, "Scheunemann disse." Quando uma criança usa pelo menos um farol BLE, um robô pode medir a intensidade do sinal e inferir conhecimento sobre qual criança está interagindo em um determinado momento ou quando é tocada. Os faróis podem ser do tamanho de uma bateria de célula tipo moeda e podem ser colocados em roupas ou bonés, sem ser visível de fora, ao contrário dos dispositivos de rastreamento externos. "
A técnica desenvolvida por Scheunemann e seus colegas não requer uma câmera e pode computar todas as informações rapidamente a bordo. Além disso, ao contrário de outros dispositivos de rastreamento, os dispositivos BLE usados pelos pesquisadores são baratos e podem ser adquiridos facilmente no mercado.
Para testar sua técnica, os pesquisadores realizaram três experimentos de prova de conceito em um ambiente de laboratório barulhento usando um robô esférico móvel chamado QueBall. Primeiro, eles usaram sua técnica para aumentar a capacidade do robô de inferir informações relacionadas à proximidade de indivíduos em seu ambiente circundante.
Em um segundo experimento, Scheunemann e seus colegas usaram os dispositivos BLE como sensores de toque, permitindo que o QueBall reconheça quando ele está sendo tocado. Finalmente, eles usaram sua técnica para permitir ao robô distinguir entre diferentes indivíduos interagindo.
“A técnica proposta por nós simplifica a existência de um robô como mediador da terapia infantil autista, "Scheunemann disse." Usando nosso método, um robô pode inferir informações de proximidade sobre uma determinada criança, sem a necessidade de calibrar uma câmera para o meio ambiente ou para mudanças ambientais. Esta tecnologia também pode ser dimensionada para outros cenários de interação humano-robô, onde as informações de proximidade de um humano são necessárias. "
Em suas avaliações, Scheunemann e seus colegas descobriram que observar a intensidade do sinal recebido bruto (RSS) entre diferentes dispositivos BLE melhorou significativamente as interações de um robô com humanos. No futuro, sua técnica pode promover um comportamento mais adaptativo em robôs que operam em uma variedade de configurações. Por exemplo, poderia facilitar o emprego de robôs como mediadores de terapia para crianças com ASD.
"Em nosso trabalho futuro, pretendemos usar essa tecnologia para equipar robôs com scanners BLE, para que eles possam facilmente inferir informações relacionadas à proximidade de e entre humanos interagindo. "
© 2019 Science X Network