Crédito:Oliver, Lanillos e Cheng.
Um desafio importante para os pesquisadores de robótica é desenvolver sistemas que possam interagir com humanos e seu ambiente circundante em situações que envolvem vários graus de incerteza. Na verdade, enquanto os humanos podem aprender continuamente com suas experiências e perceber seu corpo como um todo enquanto interagem com o mundo, os robôs ainda não possuem esses recursos.
Pesquisadores da Universidade Técnica de Munique realizaram recentemente um estudo ambicioso no qual tentaram aplicar "inferência ativa, "uma construção teórica que descreve a capacidade de unir percepção e ação, para um robô humanóide. O estudo deles faz parte de um projeto mais amplo financiado pela UE chamado SELFCEPTION, que faz a ponte entre a robótica e a psicologia cognitiva com o objetivo de desenvolver robôs mais perceptivos.
"A questão original da pesquisa que desencadeou este trabalho foi fornecer robôs humanóides e agentes artificiais em geral com a capacidade de perceber seus corpos como os humanos, "Pablo Lanillos, um dos pesquisadores que realizou o estudo, disse TechXplore. "O objetivo principal era melhorar suas capacidades de interagir sob incerteza. Sob a égide do projeto Selfception.eu Marie Skłodowska-Curie, inicialmente definimos um roteiro para incluir algumas características da percepção humana e da ação em robôs."
Em seu estudo, Lanillos e seus colegas tentaram obter uma melhor compreensão da percepção humana e então a modelaram em um robô humanóide. Isso provou ser uma tarefa muito difícil, tantos detalhes de como as informações sensoriais (visuais, tátil, etc.) é processado por humanos ainda são desconhecidos. Os pesquisadores se inspiraram no trabalho de Hermann Von Helmholtz e Karl Friston, particularmente de sua teoria de inferência ativa, que está entre os construtos neurocientíficos mais influentes.
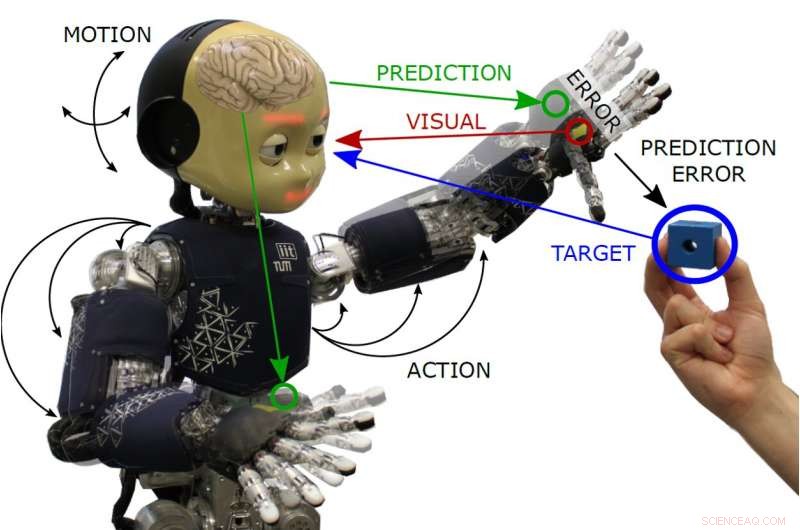
"Em essência, propomos que o robô está continuamente se aproximando de seu corpo usando seus modelos aprendidos imperfeitos, "Guillermo Oliver, outro pesquisador envolvido no estudo, disse TechXplore. "O algoritmo, com base no princípio da energia livre, apresenta percepção e ação trabalhando para um objetivo comum:reduzir o erro de previsão. Nesta abordagem, a ação faz com que os dados sensoriais correspondam melhor à previsão feita pelo modelo interno. "
Lanillos, Oliver e o Prof. Gordon Cheng foram os primeiros a aplicar inferência ativa a um robô real. Na verdade, até aqui, a inferência ativa foi testada apenas teoricamente ou em simulações parcialmente enviesadas pela simplificação dos modelos utilizados.
A abordagem deles tenta reproduzir a capacidade dos humanos de mudar suas ações (por exemplo, seu andar) em situações particulares, por exemplo, quando eles estão se aproximando de uma escada rolante do metrô, mas de repente descobre que está quebrado ou fora de serviço, e adaptar seus movimentos de acordo. O algoritmo de percepção e controle desenvolvido por Lanillos, Oliver e Cheng reproduzem um mecanismo semelhante em robôs.
Por exemplo, em uma tarefa de alcance em que um robô precisa tocar um objeto, o modelo cria um erro na localização desejada da mão que dispara uma ação em direção ao objeto. O equilíbrio (ou minimização) é obtido quando a mão do robô e o objeto estão no mesmo local.
"Essa abordagem é rara na comunidade de robótica, mas fornece tratabilidade, permite a combinação de informações sensoriais de diferentes fontes e permite o ajuste da confiabilidade de cada informação do sensor, dependendo da precisão, "Oliver disse.
Os pesquisadores aplicaram seu algoritmo ao iCub, um robô humanóide cognitivo de código aberto desenvolvido como parte de outro projeto financiado pela UE, e avaliou seu desempenho em tarefas que envolviam alcance de braço duplo e rastreamento ativo da cabeça. Em seus testes, o robô foi capaz de realizar comportamentos de alcance avançados e robustos, bem como o rastreamento ativo da cabeça de objetos em seu campo visual.
"O robô humanóide foi capaz de realizar tarefas robustas de alcance visual e rastreamento visual de um objeto usando o mesmo modelo matemático, "Oliver disse." Com este tipo de algoritmo, gostaríamos de mudar a visão atual do pipeline de percepção de entrada-saída (por exemplo, redes neurais de última geração), reforçando a ideia de percepção de loop fechado, onde passes para frente e para trás são processados online, e incluir a ação como outra variável inevitável. "
Lanillos, Oliver e Cheng são os primeiros a implementar um modelo baseado no princípio da energia livre em um robô humanóide real. Suas descobertas sugerem que a validação de tais modelos em configurações do mundo real é possível, assim como analisar as vantagens desses modelos na presença de informações sensoriais ruidosas, oclusões ou quando apenas informações parciais estão disponíveis. Os pesquisadores agora planejam aplicar seu modelo a outros robôs e testar sua generalização.
"A longo prazo, queremos possibilitar o desenvolvimento de agentes artificiais com as mesmas capacidades de adaptação e interação corporal que os humanos, "Lanillos disse." Enquanto isso, estamos desenvolvendo novos algoritmos de inteligência artificial bioinspirados. No futuro, também usaremos este modelo para investigar propriedade e agência, e quem sabe, poderemos um dia permitir o auto-reconhecimento nas máquinas. "
© 2019 Science X Network














