Um novo "simulador de partículas" desenvolvido por pesquisadores do MIT melhora as habilidades dos robôs para moldar materiais em formas de alvos simulados e interagir com objetos sólidos e líquidos. Isso poderia dar aos robôs um toque refinado para aplicações industriais ou para robótica pessoal - como modelar argila ou enrolar arroz de sushi pegajoso. Crédito:Massachusetts Institute of Technology
Um novo sistema de aprendizagem desenvolvido por pesquisadores do MIT melhora as habilidades dos robôs para moldar materiais em formas de destino e fazer previsões sobre a interação com objetos sólidos e líquidos. O sistema, conhecido como um simulador de partículas baseado em aprendizagem, poderia dar aos robôs industriais um toque mais refinado - e pode ter aplicações divertidas em robótica pessoal, como modelar formas de argila ou arroz pegajoso enrolado para sushi.
No planejamento robótico, simuladores físicos são modelos que capturam como diferentes materiais respondem à força. Os robôs são "treinados" usando os modelos, para prever os resultados de suas interações com objetos, como empurrar uma caixa sólida ou cutucar argila deformável. Mas os simuladores tradicionais baseados em aprendizagem focam principalmente em objetos rígidos e são incapazes de lidar com fluidos ou objetos mais macios. Alguns simuladores baseados na física mais precisos podem lidar com diversos materiais, mas dependem fortemente de técnicas de aproximação que introduzem erros quando os robôs interagem com objetos no mundo real.
Em um artigo apresentado na Conferência Internacional sobre Representações de Aprendizagem em maio, os pesquisadores descrevem um novo modelo que aprende a capturar como pequenas porções de diferentes materiais - "partículas" - interagem quando são cutucadas e cutucadas. O modelo aprende diretamente com os dados nos casos em que a física subjacente dos movimentos é incerta ou desconhecida. Os robôs podem então usar o modelo como um guia para prever como os líquidos, bem como materiais rígidos e deformáveis, vai reagir à força de seu toque. Enquanto o robô lida com os objetos, o modelo também ajuda a refinar ainda mais o controle do robô.
Em experimentos, uma mão robótica com dois dedos, chamado "RiceGrip, "moldou com precisão uma espuma deformável em uma configuração desejada, como um formato de" T ", que serve como substituto para o arroz de sushi. Em suma, o modelo dos pesquisadores serve como um tipo de cérebro de "física intuitiva" que os robôs podem aproveitar para reconstruir objetos tridimensionais de forma semelhante à forma como os humanos fazem.
"Os humanos têm um modelo de física intuitivo em nossas cabeças, onde podemos imaginar como um objeto se comportará se o empurrarmos ou apertarmos. Com base neste modelo intuitivo, humanos podem realizar tarefas de manipulação incríveis que estão muito além do alcance dos robôs atuais, "diz o primeiro autor Yunzhu Li, Pós-graduando no Laboratório de Ciência da Computação e Inteligência Artificial (CSAIL). "Queremos construir este tipo de modelo intuitivo para robôs para capacitá-los a fazer o que os humanos podem fazer."
“Quando as crianças têm 5 meses, eles já têm expectativas diferentes para sólidos e líquidos, "acrescenta o co-autor Jiajun Wu, um aluno de pós-graduação do CSAIL. "Isso é algo que sabemos desde cedo, então talvez seja algo que devemos tentar modelar para robôs. "
Juntando-se a Li e Wu no papel estão:Russ Tedrake, pesquisador do CSAIL e professor do Departamento de Engenharia Elétrica e Ciência da Computação (EECS); Joshua Tenenbaum, professor do Departamento de Ciências do Cérebro e Cognitivas; e Antonio Torralba, professor do EECS e diretor do MIT-IBM Watson AI Lab.
Gráficos dinâmicos
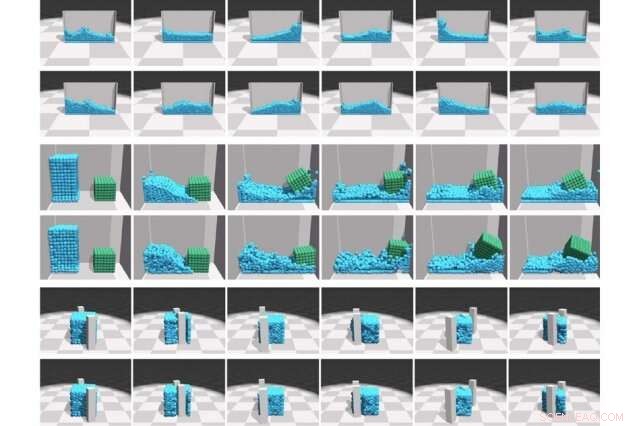
Uma inovação fundamental por trás do modelo, chamada de "rede de interação de partículas" (DPI-Nets), estava criando gráficos de interação dinâmica, que consistem em milhares de nós e arestas que podem capturar comportamentos complexos das chamadas partículas. Nos gráficos, cada nó representa uma partícula. Nós vizinhos são conectados uns aos outros usando bordas direcionadas, que representam a interação passando de uma partícula para a outra. No simulador, as partículas são centenas de pequenas esferas combinadas para formar algum líquido ou um objeto deformável.
Os gráficos são construídos como base para um sistema de aprendizado de máquina denominado rede neural de grafos. Em treinamento, com o tempo, o modelo aprende como as partículas em diferentes materiais reagem e se remodelam. Ele faz isso calculando implicitamente várias propriedades para cada partícula - como sua massa e elasticidade - para prever se e onde a partícula se moverá no gráfico quando perturbada.
O modelo então aproveita uma técnica de "propagação", que espalha instantaneamente um sinal por todo o gráfico. Os pesquisadores personalizaram a técnica para cada tipo de material - rígido, deformável, e líquido - para disparar um sinal que prediz as posições das partículas em certas etapas incrementais de tempo. Em cada etapa, ele move e reconecta partículas, se necessário.
Por exemplo, se uma caixa sólida é empurrada, as partículas perturbadas serão movidas para a frente. Como todas as partículas dentro da caixa estão rigidamente conectadas umas às outras, todas as outras partículas do objeto se movem na mesma distância calculada, rotação, e qualquer outra dimensão. As conexões de partículas permanecem intactas e a caixa se move como uma unidade única. Mas se uma área de espuma deformável for dentada, o efeito será diferente. Partículas perturbadas avançam muito, as partículas circundantes movem-se apenas ligeiramente para a frente, e as partículas mais distantes não se moverão. Com líquidos sendo derramados em um copo, as partículas podem saltar completamente de uma extremidade do gráfico para a outra. O gráfico deve aprender a prever onde e quanto todas as partículas afetadas se movem, que é computacionalmente complexo.
Moldando e adaptando
Em seu jornal, os pesquisadores demonstram o modelo atribuindo ao robô RiceGrip de dois dedos a fixação de alvos em espuma deformável. O robô primeiro usa uma câmera de detecção de profundidade e técnicas de reconhecimento de objetos para identificar a espuma. Os pesquisadores selecionam aleatoriamente as partículas dentro da forma percebida para inicializar a posição das partículas. Então, o modelo adiciona bordas entre as partículas e reconstrói a espuma em um gráfico dinâmico personalizado para materiais deformáveis.
Por causa das simulações aprendidas, o robô já tem uma boa ideia de como cada toque, dada uma certa quantidade de força, afetará cada uma das partículas no gráfico. Quando o robô começa a recortar a espuma, ele combina iterativamente a posição real das partículas com a posição-alvo das partículas. Sempre que as partículas não se alinham, ele envia um sinal de erro ao modelo. Esse sinal ajusta o modelo para melhor corresponder à física do mundo real do material.
Próximo, os pesquisadores pretendem melhorar o modelo para ajudar os robôs a prever melhor as interações com cenários parcialmente observáveis, como saber como uma pilha de caixas se moverá quando empurrada, mesmo que apenas as caixas na superfície sejam visíveis e a maioria das outras caixas estejam escondidas.
Os pesquisadores também estão explorando maneiras de combinar o modelo com um módulo de percepção de ponta a ponta, operando diretamente em imagens. Este será um projeto conjunto com o grupo de Dan Yamins; Yamin concluiu recentemente seu pós-doutorado no MIT e agora é professor assistente na Universidade de Stanford. "Você está lidando com esses casos o tempo todo em que há apenas informações parciais, "Wu diz." Estamos estendendo nosso modelo para aprender a dinâmica de todas as partículas, enquanto vê apenas uma pequena porção. "
Esta história foi republicada por cortesia do MIT News (web.mit.edu/newsoffice/), um site popular que cobre notícias sobre pesquisas do MIT, inovação e ensino.